Unser Messestand bei der Power2Drive steht! Wenn ihr noch spontan vorbei schauen wollt schreibt uns eine Email, wir haben noch konstenlose Tickets.
Blog
Messestand bei der Power2Drive
Olaf Lüke - 1 Monat, 3 Wochen her
Tinkerforge mit WARP auf der Power2Drive Messe in München
Bastian Nordmeyer - 2 Monate, 1 Woche her

Vom 07. bis zum 09. Mai 2025 sind wir mit unserer Marke WARP auf der Power2Drive Europe Messe in München.
Die Messe zählt zu den größten Messen für Ladeinfrastruktur und Elektromobilität und findet zusammen mit der Intersolar statt. Ihr findet uns in der Halle C6 an der Außenseite zur Halle C5 (Stand C6.173). Auf unserem Stand präsentieren wir euch verschiedene Ausführungen vom WARP3 Charger, WARP Ladesäulen und den neuen WARP Energy Manager 2.0. Animierte Schautafeln erläutern die Nutzung von PV-Strom im Zusammenspiel mit dynamischen Strompreisen, das Laden von Elektrofahrzeugen, die Ansteuerung von Wärmepumpen und den Einsatz von Batteriespeichern. Unser dynamisches Lastmanagement ist ebenfalls ein Thema.
Wir freuen uns über euren Besuch!
Ein Überblick über die Entwicklungen der letzten 6 Monate
Bastian Nordmeyer - 4 Monate, 2 Wochen her
Lange Zeit war es still hier auf diesem Blog... Dabei ist seit dem letzten Blogeintrag aus dem August 2024 sehr viel passiert. Die meisten Neuigkeiten betreffen unsere WARP3 Charger. Ganze elf Softwareupdates haben seither für den WARP3 Charger herausgebracht und damit folgende neuen Features veröffentlicht:
Release des Fernzugriffs
Hiermit ist ein Zugriff auf das lokale Webinterface der Wallbox über das Internet mittels my.warp-charger.com möglich. Entgegen anderer Lösungen wird nicht über die "Cloud" kommuniziert. Die Kommunikation erfolgt direkt zwischen Browser und Wallbox. Weitere Informationen hierzu finden sich auf Tinkerunity. In der neusten Version sind bis zu fünf Fernzugriffsnutzer möglich.
iOS und Android Apps
Die Apps für iOS und Android sind seit Ende letzten Jahres als Beta verfügbar. Technisch nutzen die Apps den Fernzugriff. Wer am Testen teilnehmen möchte kann dies gerne tun. Die Beschreibung dazu gibt es in Forum. Für alle anderen wird es aber voraussichtlich auch nicht mehr lange dauern, bis wir die Apps offiziell in den jeweiligen Stores veröffentlichen.
Dynamisches Lastmanagement
Bei der Entwicklung des dynamischen Lastmanagements haben wir es uns nun wirklich nicht einfach gemacht. Um so stolzer sind wir auf das Ergebnis! In der neusten Version unterstützt das Lastmanagement ein Verbund von bis zu 64 Wallboxen und beachtet dabei Fairness (alle Fahrzeuge werden geladen), eine Minimierung von Schaltvorgängen, Phasenrotationen, das Ladeverhalten der Fahrzeuge (1ph vs. 3ph etc.) u.v.m.
PV-Überschussladen
Es wird nun mehr als eine Wallbox unterstützt. Ist ein Batteriespeicher vorhanden und kann dieser ausgelesen werden, dann wird dieser in die Regelung mit einbezogen.
Erweiterung kompatibler Stromzähler/Wechselrichter
Wir versuchen unsere Geräte möglichst mit allen Fremdgeräten kompatibel zu machen. Die Idee dahinter ist, dass die Wallbox auf bereits existierende Stromzähler, PV-Wechselrichter oder Batteriespeicher zugreifen kann. Zum Glück bieten viele Hersteller standardisierte Schnittstellen wie SunSpec oder Modbus TCP. Leider zeigt aber die Erfahrung, dass der Aufwand doch ein ganzes Stück größer ist als wir dachten, da die Standards zum Teil "frei interpretiert" oder einfach falsch implementiert werden. Im einfachsten Fall betrifft dies gedrehte Vorzeichen. In schwierigeren Fällen falsche Datentypen, geframte Daten, rotierende IDs usw.
PV Ertragsprognose

Zur Zeit können bis zu sechs Dachflächen mit unterschiedlichen Ausrichtungen etc. angelegt werden für die über den Service api.forecast.solar die PV-Ertragsprognosedaten für den kommenden Tag abgerufen werden. Diese Daten können vom Eco-Modus genutzt werden.
Dynamische Strompreise

Die Anzahl der Anbieter für dynamische Stromtarife steigt täglich. Um alle Anbieter unterstützen zu können haben wir eine Lösung implementiert, die vollständig konfigurierbar ist. Die Stromerzeugungskosten, die bundesweit identisch sind, werden über die Strombörse ENTSO-E bezogen. Netzentgelte, Steuern, Preisaufschläge etc. können flexibel je nach Anbieter definiert werden. Somit kann jeder dynamische Stromtarif konfiguriert werden.
Eco Modus

Mit dem Eco-Modus bieten wir einen neuen Lademodus für Elektrofahrzeuge an. Es wird versucht ein Fahrzeug mittels PV-Überschuss bis zu einer angegebenen Abfahrtszeit zu laden. Stellt das System fest, dass die erwartene PV-Erträge zu gering ausfallen, so werden die günstigsten Stunden eines dynamischen Stromtarifs zum Laden genutzt. Je nach Einstellungen und Abfahrtszeiten kann somit im Sommer vollautomatisch der PV-Überschuss genutzt werden. Im Winter, bei wenig PV-Ertrag, werden günstige Stromkosten genutzt.
Alle Informationen zum neuen WARP3 Charger
Bastian Nordmeyer - 10 Monate, 2 Wochen her

Neu? Eigentlich ist bereits seit Ende März die dritte Generation unseres WARP Chargers (WARP3 Charger) in unserem Shop erhältlich. Wir möchten uns bei euch entschuldigen, dass wir diese Neuigkeiten nicht früher hier im Blog geteilt haben. Der Erfolg der neuen Wallboxgeneration hat uns etwas überfahren, so dass wir einfach nicht dazu gekommen sind, darüber zu berichten. Daher folgt nun hier ein spätes, dafür aber umfangreiches Update.
Mit dieser neuen Wallboxgeneration haben wir auch die dazugehörige Online-Präsenz überarbeitet: Auf warp-charger.com findet ihr einen komplett neuen Webauftritt rund um unsere Wallboxen. Zudem haben wir die Dokumentation zur Wallbox überarbeitet. Technische Infos zur API, kompatiblen Stromzählern usw. findet ihr auf einer eigenen Unterseite unter docs.warp-charger.com.
Mit WARP3 haben wir euer Feedback umgesetzt und einige Verbesserungen integriert. Nachfolgend möchten wir euch die wichtigsten Änderungen im Vergleich zu WARP2 kurz noch einmal darstellen:
- Der WARP3 Charger verfügt über eine integrierte Phasenumschaltung. Es sind zwei 63A Schütze verbaut. Somit kann die Wallbox zum PV-Überschussladen selbstständig auf einen einphasigen Betrieb umschalten und ermöglicht eine Ladeleistung schon ab 1,4kW.
- In dem WARP3 Charger Pro kommt ein hochwertiger Eltako Stromzähler im Vergleich zum bisher eingesetzen Eastron Stromzähler zum Einsatz. Eine RGB LED in der Frontblende visualisiert den Status der Wallbox.
- Die Installation ist deutlich vereinfacht worden. Wir haben darauf geachtet, dass deutlich mehr Platz für die Kabelführung innerhalb der Wallbox verfügbar ist. Die Zuleitung wird bei allen Modellen bequem an einem Klemmblock angeschlossen. Das LAN Kabel wird nun auch wieder direkt am Controller angeschlossen, anstatt über ein Adapterkabel. Auch hier wurde darauf geachtet, dass viel Raum für alle gängigen RJ45-Steckertypen existiert.
- Das Gute ist aber geblieben. Auch WARP3 ist nach wie vor modular aufgebaut, so dass Einzelteile getauscht werden können. Das Gehäuse ist ebenfalls beibehalten worden, so dass nach wie vor das stabile und handliche Polyestergehäuse zum Einsatz kommt. Auch wenn technisch überhaupt nicht notwendig setzen wir weiter auf massive 63A Schütze um eine lange Lebensdauer zu gewährleisten.
Softwareupdates
Softwareseitig hat sich seit dem letzen Blogpost einiges getan. Es gab mehrere Updates für WARP3 aber natürlich auch für die älteren Generationen.
Stromzähler Schnittstellen
Stromzähler, Wechselrichter und Batteriespeicher können von unseren Wallboxen und dem WARP Energy Manager ausgelesen werden. Technisch betrachten wir diese alle als Stromzähler, da wir Leistungswerte etc. erhalten.
Neben SunSpec unterstützen wir nun auch SMA Speedwire direkt, so dass wir Wechselrichter und Stromzähler über diese Schnittstellen auslesen können. Zusätzlich können die Wallboxen mit dem neusten Firmwareupdate Geräte auch mittels Modbus TCP direkt abfragen. Für uns bekannte Geräte haben wir Registertabellen angelegt, so dass als Beispiel Wechselrichter von Victron oder Deye ganz einfach ausgelesen werden können. Ihr könnt aber auch eigene Modbus TCP Registertabellen anlegen, solltet ihr ein Gerät auslesen wollen, welches wir nicht unterstützen. Wir arbeiten daran für möglichst alle Geräte direkt Registertabellen anzubieten, so dass ihr diese einfach auswählen könnt. Die maximale Anzahl von konfigurierbaren Stromzählern haben wir auch auf fünf für die Wallboxen und sieben für den Energy Manager erhöht.
Eine Übersicht der kompatiblen Stromzähler könnt ihr hier erhalten.
Fernzugriff auf die Wallbox
Das Alpha Release zum Fernzugriff ist im Forum veröffentlicht. Hier der dazugehörige Blogbeitrag mit der dazugehörigen Firmware.
Damit könnt aus der Ferne auf eure Wallbox über den Browser zugreifen. Im Gegensatz zu Lösungen anderer Hersteller ist die Kommunikation Ende-zu-Ende verschlüsselt und läuft nicht über unseren Server. Dennoch wird ein Relay-Server benötigt, den wir mittels my.warp-charger.com bereitstellen. Eine ausführliche technische Beschreibung findet ihr in dem Post auf Tinkerunity. Wir gehen davon aus, dass wir den Fernzugriff zeitnah in ein Firmware-Release aufnehmen können.
iOS und Android App
Wir arbeiten an Apps für iOS und Android für den Zugriff auf die Wallboxen. Diese Apps nutzen den oben genannten Fernzugriff. Dadurch ist es noch etwas bequemer auf die Wallboxen zuzugreifen.
Dynamisches Lastmanagement
Nach längerer Ankündigung ist es bald soweit. Wir sind hier fleißig am testen und haben dazu auch ein Beta Release im Forum veröffentlicht. Wir werden noch etwas mehr Testen, aber das Feature wird zeitnah in eine Release-Firmware kommen. In das dynamische Lastmanagement haben wir sehr viel Arbeit gesteckt um zum Beispiel mit dem doch zum Teil sehr unterschiedlichen Ladeverhalten von Elektrofahrzeugen umzugehen. Wir haben sehr darauf geachtet eine faire Ladeverteilung zu implementieren, so dass kein Fahrzeug benachteiligt wird. Eine umfassende technische Beschreibung des dynamischen Lastmanagements findet man auf der Dokumentationsseite zum dynamischen Lastmanagement.
Automatisches Firmwareupdate
In dem nächsten Firmwarerealese wird die Möglichkeit eines automatischen Firmwareupdates enthalten sein. Es ist dann möglich, dass die Wallbox selbstständig nach einer neueren Firmware sucht. Dazu ist dann einfach ein Knopf im Webinterface zu klicken. Ist eine neuere Firmware als die installierte Version verfügbar, so kann diese über einen weiteren Knopfdruck installiert werden.
Ausblick
Dynamische Strompreise & PV-Ertrags-Vorhersage
Wir arbeiten zur Zeit daran das Laden mit dynamischen Strompreisen auf den Wallboxen zu unterstützen. Damit kann dann die Wallbox das Fahrzeug laden, wenn der Strompreis am günstigsten ist. Diese Option konkurriert aber mit einem PV Überschussladen. Es wäre ja suboptimal, wenn beispielhaft morgens um 04:00 Uhr mit dem günstigen Strom von 15 Cent geladen wird, die PV Anlage aber ab 08:00 Uhr genug Leistung liefert und somit eine günstigere Ladung möglich wäre. Aus diesem Grund wird zusätzlich eine PV-Ertrags-Vorhersage kommen mit der Entschieden werden kann ob auf ein PV Überschussladen gewartet werden kann oder aber Nachts günstiger Strom aus dem Netz bezogen werden sollte.
WARP Energy Manager 2.0
Unser WARP Energy Manager ist sehr stark auf den WARP2 Charger ausgelegt und war insbesondere zur externen Phasenumschaltung für diese Wallbox gedacht. Dieses Feature ist für den WARP3 Charger nicht mehr notwendig. Mit dem WARP Energy Manager 2.0 haben wir mit den Arbeiten an der zweiten Generation begonnen. Der Energy Manager wird das selbe Konzept nutzen, aber über mehr Ein- und Ausgänge verfügen. Er wird sich von einer Steuerbox im Rahmen der "§14A EnWG Steuerbare Verbrauchseinrichtungen" fernsteuern lassen. SG-Ready fähige Wärmepumpen und andere Verbraucher können als Verbraucher ähnlich wie die WARP Charger mittels PV-Ertrag und dynamischen Strompreisen steuern lassen.
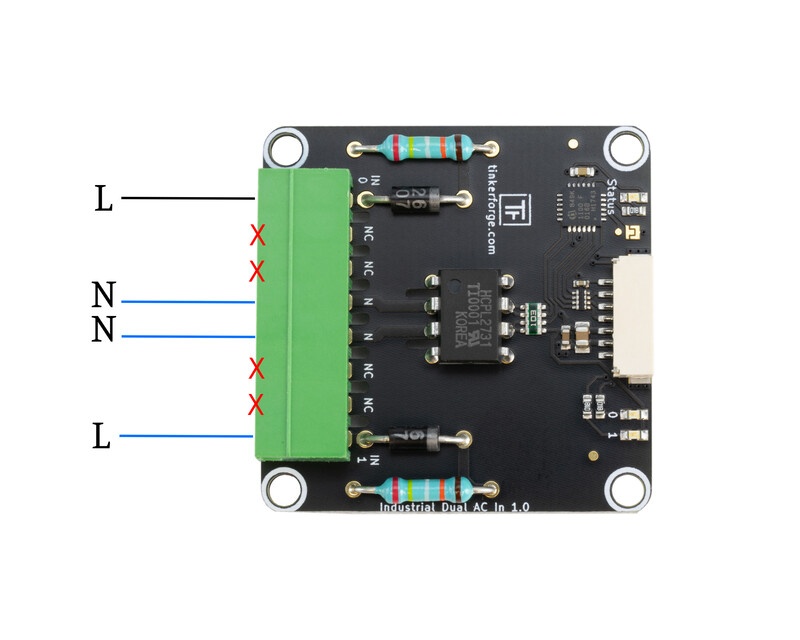
Neues HAT Brick und Industrial Dual AC In Bricklet
Bastian Nordmeyer - 1 Jahr, 3 Monate her
Heute haben wir die Version 1.9 des HAT Bricks veröffentlicht. Diese ist mit einer verbesserten Stromversorgung ausgestattet und kann nun mit einer Eingangsspannung von 6V-36V betrieben werden. Das HAT Brick unterstützt auch das leistungshungrige Raspberry Pi 5.

Zusätzlich haben wir ein neues Bricklet veröffentlicht: Das Industrial Dual AC In Bricklet. Dieses Bricklet verfügt über zwei 230VAC taugliche digitale Eingänge. Es kann also genutzt werden um zwei 230VAC getrennt zu überwachen. Dabei teilen sich beide Stromkreise ein gemeinsames N.