- Getting Started
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ for Microcontrollers
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Requirements
- Installation
- Testing an Example
- API Reference and Examples
- IP Connection
- Bricks
- Bricks (Discontinued)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Discontinued)
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Source Code and Bug Tracking
- Programming Interface
- Kits
- Embedded Boards
- Specifications
LabVIEW - IMU Bricklet 3.0¶
This is the description of the LabVIEW API bindings for the IMU Bricklet 3.0. General information and technical specifications for the IMU Bricklet 3.0 are summarized in its hardware description.
An installation guide for the LabVIEW API bindings is part of their general description.
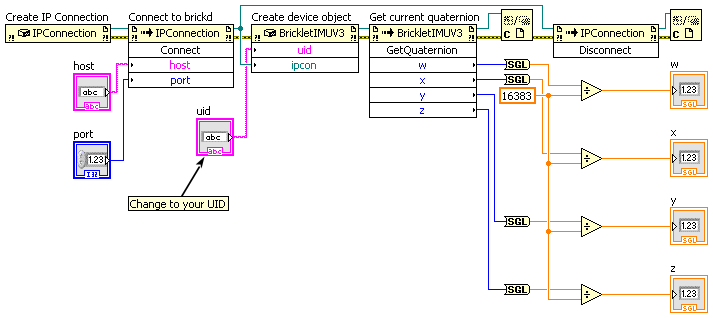
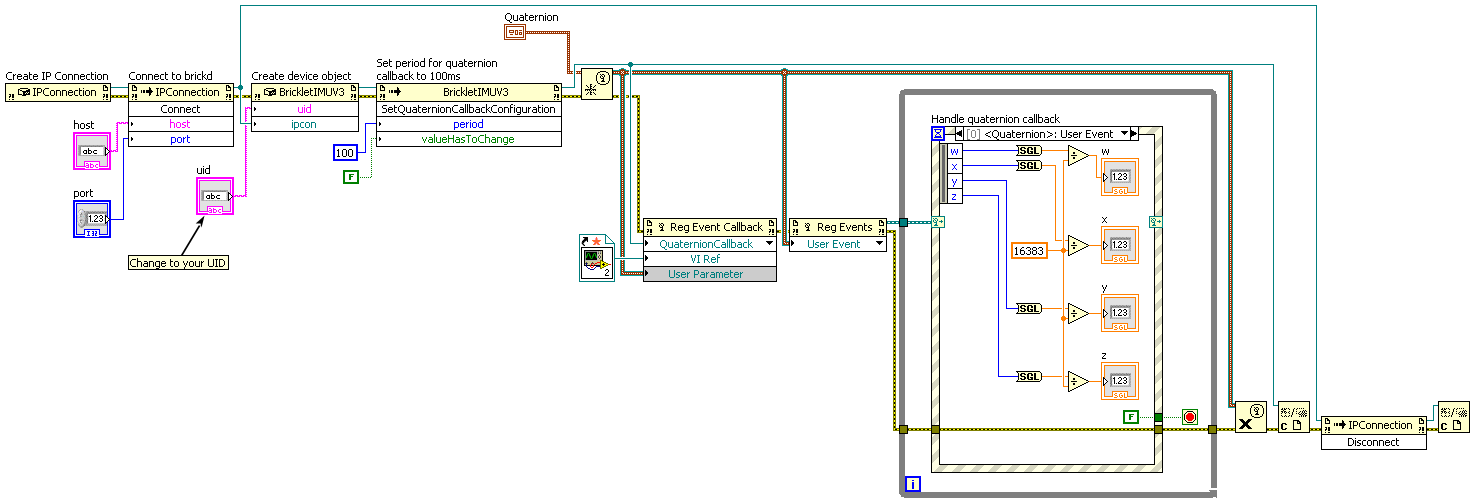
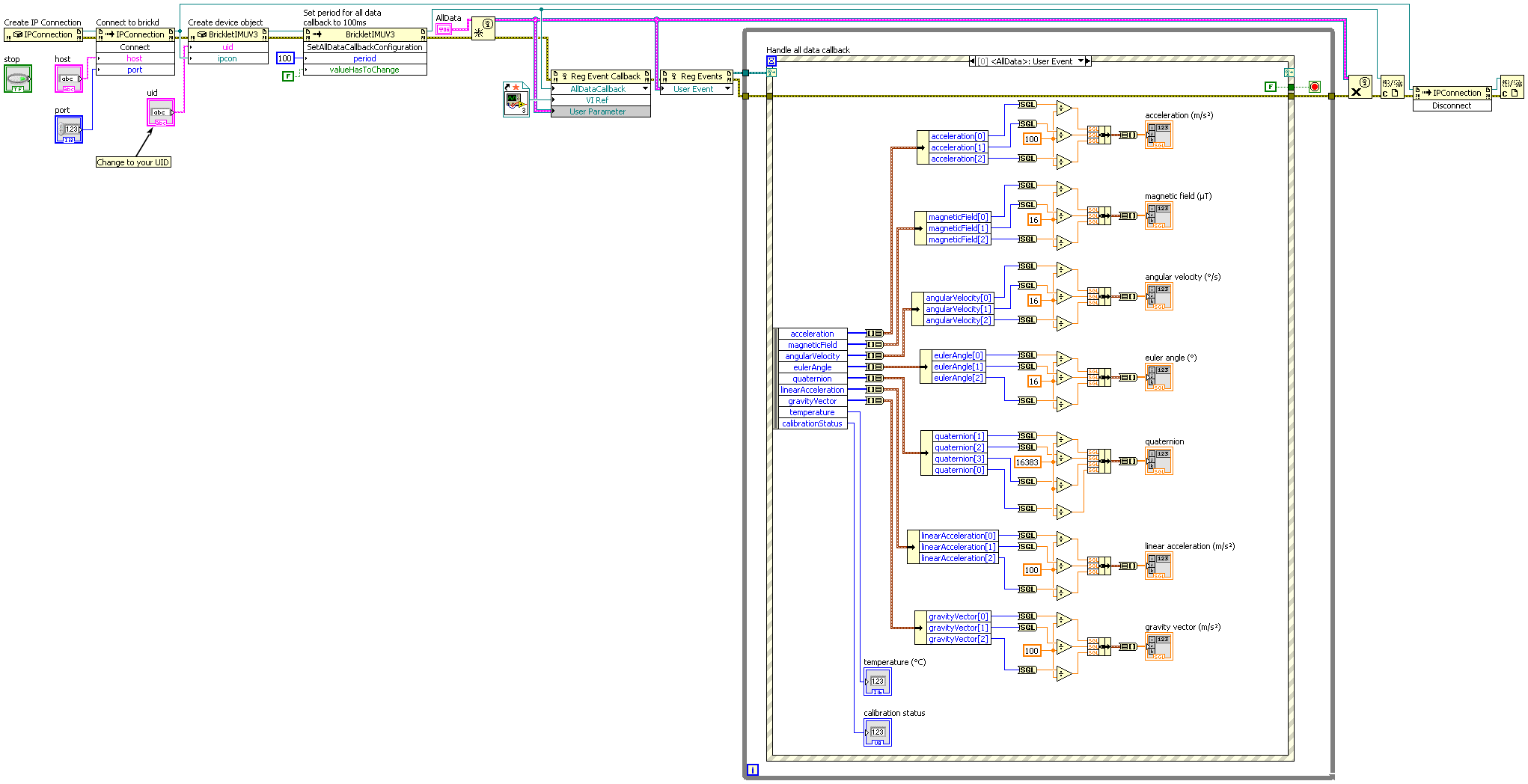
Examples¶
The example code below is Public Domain (CC0 1.0).
API¶
Generally, every function of the LabVIEW bindings that outputs a value can
report a Tinkerforge.TimeoutException. This error gets reported if the
device did not respond. If a cable based connection is used, it is
unlikely that this exception gets thrown (assuming nobody plugs the
device out). However, if a wireless connection is used, timeouts will occur
if the distance to the device gets too big.
The namespace for all Brick/Bricklet bindings and the IPConnection is
Tinkerforge.*.
Basic Functions¶
-
BrickletIMUV3(uid, ipcon) → imuV3¶ Input: - uid – Type: String
- ipcon – Type: .NET Refnum (IPConnection)
Output: - imuV3 – Type: .NET Refnum (BrickletIMUV3)
Creates an object with the unique device ID
uid. This object can then be used after the IP Connection is connected.
-
BrickletIMUV3.GetOrientation() → heading, roll, pitch¶ Output: - heading – Type: Int16, Unit: 1/16 °, Range: [0 to 5760]
- roll – Type: Int16, Unit: 1/16 °, Range: [-1440 to 1440]
- pitch – Type: Int16, Unit: 1/16 °, Range: [-2880 to 2880]
Returns the current orientation (heading, roll, pitch) of the IMU Brick as independent Euler angles. Note that Euler angles always experience a gimbal lock. We recommend that you use quaternions instead, if you need the absolute orientation.
If you want to get the orientation periodically, it is recommended to use the
OrientationCallbackcallback and set the period withSetOrientationCallbackConfiguration().
-
BrickletIMUV3.GetLinearAcceleration() → x, y, z¶ Output: - x – Type: Int16, Unit: 1 cm/s², Range: ?
- y – Type: Int16, Unit: 1 cm/s², Range: ?
- z – Type: Int16, Unit: 1 cm/s², Range: ?
Returns the linear acceleration of the IMU Brick for the x, y and z axis. The acceleration is in the range configured with
SetSensorConfiguration().The linear acceleration is the acceleration in each of the three axis of the IMU Brick with the influences of gravity removed.
It is also possible to get the gravity vector with the influence of linear acceleration removed, see
GetGravityVector().If you want to get the linear acceleration periodically, it is recommended to use the
LinearAccelerationCallbackcallback and set the period withSetLinearAccelerationCallbackConfiguration().
-
BrickletIMUV3.GetGravityVector() → x, y, z¶ Output: - x – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- y – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- z – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
Returns the current gravity vector of the IMU Brick for the x, y and z axis.
The gravity vector is the acceleration that occurs due to gravity. Influences of additional linear acceleration are removed.
It is also possible to get the linear acceleration with the influence of gravity removed, see
GetLinearAcceleration().If you want to get the gravity vector periodically, it is recommended to use the
GravityVectorCallbackcallback and set the period withSetGravityVectorCallbackConfiguration().
-
BrickletIMUV3.GetQuaternion() → w, x, y, z¶ Output: - w – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- x – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- y – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- z – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
Returns the current orientation (w, x, y, z) of the IMU Brick as quaternions.
You have to divide the return values by 16383 (14 bit) to get the usual range of -1.0 to +1.0 for quaternions.
If you want to get the quaternions periodically, it is recommended to use the
QuaternionCallbackcallback and set the period withSetQuaternionCallbackConfiguration().
-
BrickletIMUV3.GetAllData() → acceleration, magneticField, angularVelocity, eulerAngle, quaternion, linearAcceleration, gravityVector, temperature, calibrationStatus¶ Output: - acceleration – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: ?
- 1: y – Type: Int16, Unit: 1 cm/s², Range: ?
- 2: z – Type: Int16, Unit: 1 cm/s², Range: ?
- magneticField – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- 1: y – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- 2: z – Type: Int16, Unit: 1/16 µT, Range: [-40000 to 40000]
- angularVelocity – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1/16 °/s, Range: ?
- 1: y – Type: Int16, Unit: 1/16 °/s, Range: ?
- 2: z – Type: Int16, Unit: 1/16 °/s, Range: ?
- eulerAngle – Type: Int16[3]
- 0: heading – Type: Int16, Unit: 1/16 °, Range: [0 to 5760]
- 1: roll – Type: Int16, Unit: 1/16 °, Range: [-1440 to 1440]
- 2: pitch – Type: Int16, Unit: 1/16 °, Range: [-2880 to 2880]
- quaternion – Type: Int16[4]
- 0: w – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 1: x – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 2: y – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 3: z – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- linearAcceleration – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: ?
- 1: y – Type: Int16, Unit: 1 cm/s², Range: ?
- 2: z – Type: Int16, Unit: 1 cm/s², Range: ?
- gravityVector – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- 1: y – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- 2: z – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- temperature – Type: Int16, Unit: 1 °C, Range: [-128 to 127]
- calibrationStatus – Type: Byte, Range: [0 to 255]
Return all of the available data of the IMU Brick.
- acceleration (see
GetAcceleration()) - magnetic field (see
GetMagneticField()) - angular velocity (see
GetAngularVelocity()) - Euler angles (see
GetOrientation()) - quaternion (see
GetQuaternion()) - linear acceleration (see
GetLinearAcceleration()) - gravity vector (see
GetGravityVector()) - temperature (see
GetTemperature()) - calibration status (see below)
The calibration status consists of four pairs of two bits. Each pair of bits represents the status of the current calibration.
- bit 0-1: Magnetometer
- bit 2-3: Accelerometer
- bit 4-5: Gyroscope
- bit 6-7: System
A value of 0 means for "not calibrated" and a value of 3 means "fully calibrated". In your program you should always be able to ignore the calibration status, it is used by the calibration window of the Brick Viewer and it can be ignored after the first calibration. See the documentation in the calibration window for more information regarding the calibration of the IMU Brick.
If you want to get the data periodically, it is recommended to use the
AllDataCallbackcallback and set the period withSetAllDataCallbackConfiguration().
Advanced Functions¶
-
BrickletIMUV3.GetAcceleration() → x, y, z¶ Output: - x – Type: Int16, Unit: 1 cm/s², Range: ?
- y – Type: Int16, Unit: 1 cm/s², Range: ?
- z – Type: Int16, Unit: 1 cm/s², Range: ?
Returns the calibrated acceleration from the accelerometer for the x, y and z axis. The acceleration is in the range configured with
SetSensorConfiguration().If you want to get the acceleration periodically, it is recommended to use the
AccelerationCallbackcallback and set the period withSetAccelerationCallbackConfiguration().
-
BrickletIMUV3.GetMagneticField() → x, y, z¶ Output: - x – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- y – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- z – Type: Int16, Unit: 1/16 µT, Range: [-40000 to 40000]
Returns the calibrated magnetic field from the magnetometer for the x, y and z axis.
If you want to get the magnetic field periodically, it is recommended to use the
MagneticFieldCallbackcallback and set the period withSetMagneticFieldCallbackConfiguration().
-
BrickletIMUV3.GetAngularVelocity() → x, y, z¶ Output: - x – Type: Int16, Unit: 1/16 °/s, Range: ?
- y – Type: Int16, Unit: 1/16 °/s, Range: ?
- z – Type: Int16, Unit: 1/16 °/s, Range: ?
Returns the calibrated angular velocity from the gyroscope for the x, y and z axis. The angular velocity is in the range configured with
SetSensorConfiguration().If you want to get the angular velocity periodically, it is recommended to use the
AngularVelocityCallbackacallback nd set the period withSetAngularVelocityCallbackConfiguration().
-
BrickletIMUV3.GetTemperature() → temperature¶ Output: - temperature – Type: Int16, Unit: 1 °C, Range: [-128 to 127]
Returns the temperature of the IMU Brick. The temperature is measured in the core of the BNO055 IC, it is not the ambient temperature
-
BrickletIMUV3.SaveCalibration() → calibrationDone¶ Output: - calibrationDone – Type: Boolean
A call of this function saves the current calibration to be used as a starting point for the next restart of continuous calibration of the IMU Brick.
A return value of true means that the calibration could be used and false means that it could not be used (this happens if the calibration status is not "fully calibrated").
This function is used by the calibration window of the Brick Viewer, you should not need to call it in your program.
-
BrickletIMUV3.SetSensorConfiguration(magnetometerRate, gyroscopeRange, gyroscopeBandwidth, accelerometerRange, accelerometerBandwidth)¶ Input: - magnetometerRate – Type: Byte, Range: See constants, Default: 5
- gyroscopeRange – Type: Byte, Range: See constants, Default: 0
- gyroscopeBandwidth – Type: Byte, Range: See constants, Default: 7
- accelerometerRange – Type: Byte, Range: See constants, Default: 1
- accelerometerBandwidth – Type: Byte, Range: See constants, Default: 3
Sets the available sensor configuration for the Magnetometer, Gyroscope and Accelerometer. The Accelerometer Range is user selectable in all fusion modes, all other configurations are auto-controlled in fusion mode.
The following constants are available for this function:
For magnetometerRate:
- BrickletIMUV3.MAGNETOMETER_RATE_2HZ = 0
- BrickletIMUV3.MAGNETOMETER_RATE_6HZ = 1
- BrickletIMUV3.MAGNETOMETER_RATE_8HZ = 2
- BrickletIMUV3.MAGNETOMETER_RATE_10HZ = 3
- BrickletIMUV3.MAGNETOMETER_RATE_15HZ = 4
- BrickletIMUV3.MAGNETOMETER_RATE_20HZ = 5
- BrickletIMUV3.MAGNETOMETER_RATE_25HZ = 6
- BrickletIMUV3.MAGNETOMETER_RATE_30HZ = 7
For gyroscopeRange:
- BrickletIMUV3.GYROSCOPE_RANGE_2000DPS = 0
- BrickletIMUV3.GYROSCOPE_RANGE_1000DPS = 1
- BrickletIMUV3.GYROSCOPE_RANGE_500DPS = 2
- BrickletIMUV3.GYROSCOPE_RANGE_250DPS = 3
- BrickletIMUV3.GYROSCOPE_RANGE_125DPS = 4
For gyroscopeBandwidth:
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_523HZ = 0
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_230HZ = 1
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_116HZ = 2
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_47HZ = 3
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_23HZ = 4
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_12HZ = 5
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_64HZ = 6
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_32HZ = 7
For accelerometerRange:
- BrickletIMUV3.ACCELEROMETER_RANGE_2G = 0
- BrickletIMUV3.ACCELEROMETER_RANGE_4G = 1
- BrickletIMUV3.ACCELEROMETER_RANGE_8G = 2
- BrickletIMUV3.ACCELEROMETER_RANGE_16G = 3
For accelerometerBandwidth:
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_7_81HZ = 0
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_15_63HZ = 1
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_31_25HZ = 2
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_62_5HZ = 3
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_125HZ = 4
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_250HZ = 5
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_500HZ = 6
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_1000HZ = 7
-
BrickletIMUV3.GetSensorConfiguration() → magnetometerRate, gyroscopeRange, gyroscopeBandwidth, accelerometerRange, accelerometerBandwidth¶ Output: - magnetometerRate – Type: Byte, Range: See constants, Default: 5
- gyroscopeRange – Type: Byte, Range: See constants, Default: 0
- gyroscopeBandwidth – Type: Byte, Range: See constants, Default: 7
- accelerometerRange – Type: Byte, Range: See constants, Default: 1
- accelerometerBandwidth – Type: Byte, Range: See constants, Default: 3
Returns the sensor configuration as set by
SetSensorConfiguration().The following constants are available for this function:
For magnetometerRate:
- BrickletIMUV3.MAGNETOMETER_RATE_2HZ = 0
- BrickletIMUV3.MAGNETOMETER_RATE_6HZ = 1
- BrickletIMUV3.MAGNETOMETER_RATE_8HZ = 2
- BrickletIMUV3.MAGNETOMETER_RATE_10HZ = 3
- BrickletIMUV3.MAGNETOMETER_RATE_15HZ = 4
- BrickletIMUV3.MAGNETOMETER_RATE_20HZ = 5
- BrickletIMUV3.MAGNETOMETER_RATE_25HZ = 6
- BrickletIMUV3.MAGNETOMETER_RATE_30HZ = 7
For gyroscopeRange:
- BrickletIMUV3.GYROSCOPE_RANGE_2000DPS = 0
- BrickletIMUV3.GYROSCOPE_RANGE_1000DPS = 1
- BrickletIMUV3.GYROSCOPE_RANGE_500DPS = 2
- BrickletIMUV3.GYROSCOPE_RANGE_250DPS = 3
- BrickletIMUV3.GYROSCOPE_RANGE_125DPS = 4
For gyroscopeBandwidth:
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_523HZ = 0
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_230HZ = 1
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_116HZ = 2
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_47HZ = 3
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_23HZ = 4
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_12HZ = 5
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_64HZ = 6
- BrickletIMUV3.GYROSCOPE_BANDWIDTH_32HZ = 7
For accelerometerRange:
- BrickletIMUV3.ACCELEROMETER_RANGE_2G = 0
- BrickletIMUV3.ACCELEROMETER_RANGE_4G = 1
- BrickletIMUV3.ACCELEROMETER_RANGE_8G = 2
- BrickletIMUV3.ACCELEROMETER_RANGE_16G = 3
For accelerometerBandwidth:
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_7_81HZ = 0
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_15_63HZ = 1
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_31_25HZ = 2
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_62_5HZ = 3
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_125HZ = 4
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_250HZ = 5
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_500HZ = 6
- BrickletIMUV3.ACCELEROMETER_BANDWIDTH_1000HZ = 7
-
BrickletIMUV3.SetSensorFusionMode(mode)¶ Input: - mode – Type: Byte, Range: See constants, Default: 1
If the fusion mode is turned off, the functions
GetAcceleration(),GetMagneticField()andGetAngularVelocity()return uncalibrated and uncompensated sensor data. All other sensor data getters return no data.Since firmware version 2.0.6 you can also use a fusion mode without magnetometer. In this mode the calculated orientation is relative (with magnetometer it is absolute with respect to the earth). However, the calculation can't be influenced by spurious magnetic fields.
Since firmware version 2.0.13 you can also use a fusion mode without fast magnetometer calibration. This mode is the same as the normal fusion mode, but the fast magnetometer calibration is turned off. So to find the orientation the first time will likely take longer, but small magnetic influences might not affect the automatic calibration as much.
The following constants are available for this function:
For mode:
- BrickletIMUV3.SENSOR_FUSION_OFF = 0
- BrickletIMUV3.SENSOR_FUSION_ON = 1
- BrickletIMUV3.SENSOR_FUSION_ON_WITHOUT_MAGNETOMETER = 2
- BrickletIMUV3.SENSOR_FUSION_ON_WITHOUT_FAST_MAGNETOMETER_CALIBRATION = 3
-
BrickletIMUV3.GetSensorFusionMode() → mode¶ Output: - mode – Type: Byte, Range: See constants, Default: 1
Returns the sensor fusion mode as set by
SetSensorFusionMode().The following constants are available for this function:
For mode:
- BrickletIMUV3.SENSOR_FUSION_OFF = 0
- BrickletIMUV3.SENSOR_FUSION_ON = 1
- BrickletIMUV3.SENSOR_FUSION_ON_WITHOUT_MAGNETOMETER = 2
- BrickletIMUV3.SENSOR_FUSION_ON_WITHOUT_FAST_MAGNETOMETER_CALIBRATION = 3
-
BrickletIMUV3.GetSPITFPErrorCount() → errorCountAckChecksum, errorCountMessageChecksum, errorCountFrame, errorCountOverflow¶ Output: - errorCountAckChecksum – Type: Int64, Range: [0 to 232 - 1]
- errorCountMessageChecksum – Type: Int64, Range: [0 to 232 - 1]
- errorCountFrame – Type: Int64, Range: [0 to 232 - 1]
- errorCountOverflow – Type: Int64, Range: [0 to 232 - 1]
Returns the error count for the communication between Brick and Bricklet.
The errors are divided into
- ACK checksum errors,
- message checksum errors,
- framing errors and
- overflow errors.
The errors counts are for errors that occur on the Bricklet side. All Bricks have a similar function that returns the errors on the Brick side.
-
BrickletIMUV3.SetStatusLEDConfig(config)¶ Input: - config – Type: Byte, Range: See constants, Default: 3
Sets the status LED configuration. By default the LED shows communication traffic between Brick and Bricklet, it flickers once for every 10 received data packets.
You can also turn the LED permanently on/off or show a heartbeat.
If the Bricklet is in bootloader mode, the LED is will show heartbeat by default.
The following constants are available for this function:
For config:
- BrickletIMUV3.STATUS_LED_CONFIG_OFF = 0
- BrickletIMUV3.STATUS_LED_CONFIG_ON = 1
- BrickletIMUV3.STATUS_LED_CONFIG_SHOW_HEARTBEAT = 2
- BrickletIMUV3.STATUS_LED_CONFIG_SHOW_STATUS = 3
-
BrickletIMUV3.GetStatusLEDConfig() → config¶ Output: - config – Type: Byte, Range: See constants, Default: 3
Returns the configuration as set by
SetStatusLEDConfig()The following constants are available for this function:
For config:
- BrickletIMUV3.STATUS_LED_CONFIG_OFF = 0
- BrickletIMUV3.STATUS_LED_CONFIG_ON = 1
- BrickletIMUV3.STATUS_LED_CONFIG_SHOW_HEARTBEAT = 2
- BrickletIMUV3.STATUS_LED_CONFIG_SHOW_STATUS = 3
-
BrickletIMUV3.GetChipTemperature() → temperature¶ Output: - temperature – Type: Int16, Unit: 1 °C, Range: [-215 to 215 - 1]
Returns the temperature as measured inside the microcontroller. The value returned is not the ambient temperature!
The temperature is only proportional to the real temperature and it has bad accuracy. Practically it is only useful as an indicator for temperature changes.
-
BrickletIMUV3.Reset()¶ Calling this function will reset the Bricklet. All configurations will be lost.
After a reset you have to create new device objects, calling functions on the existing ones will result in undefined behavior!
-
BrickletIMUV3.GetIdentity() → uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶ Output: - uid – Type: String, Length: up to 8
- connectedUid – Type: String, Length: up to 8
- position – Type: Char, Range: ["a" to "h", "z"]
- hardwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- firmwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- deviceIdentifier – Type: Int32, Range: [0 to 216 - 1]
Returns the UID, the UID where the Bricklet is connected to, the position, the hardware and firmware version as well as the device identifier.
The position can be 'a', 'b', 'c', 'd', 'e', 'f', 'g' or 'h' (Bricklet Port). A Bricklet connected to an Isolator Bricklet is always at position 'z'.
The device identifier numbers can be found here. There is also a constant for the device identifier of this Bricklet.
Callback Configuration Functions¶
-
BrickletIMUV3.SetAccelerationCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
AccelerationCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetAccelerationCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetAccelerationCallbackConfiguration().
-
BrickletIMUV3.SetMagneticFieldCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
MagneticFieldCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetMagneticFieldCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetMagneticFieldCallbackConfiguration().
-
BrickletIMUV3.SetAngularVelocityCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
AngularVelocityCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetAngularVelocityCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetAngularVelocityCallbackConfiguration().
-
BrickletIMUV3.SetTemperatureCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
TemperatureCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetTemperatureCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetTemperatureCallbackConfiguration().
-
BrickletIMUV3.SetOrientationCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
OrientationCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetOrientationCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetOrientationCallbackConfiguration().
-
BrickletIMUV3.SetLinearAccelerationCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
LinearAccelerationCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetLinearAccelerationCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetLinearAccelerationCallbackConfiguration().
-
BrickletIMUV3.SetGravityVectorCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
GravityVectorCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetGravityVectorCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetGravityVectorCallbackConfiguration().
-
BrickletIMUV3.SetQuaternionCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
QuaternionCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetQuaternionCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetQuaternionCallbackConfiguration().
-
BrickletIMUV3.SetAllDataCallbackConfiguration(period, valueHasToChange)¶ Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
The period is the period with which the
AllDataCallbackcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
-
BrickletIMUV3.GetAllDataCallbackConfiguration() → period, valueHasToChange¶ Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- valueHasToChange – Type: Boolean, Default: F
Returns the callback configuration as set by
SetAllDataCallbackConfiguration().
Callbacks¶
Callbacks can be registered to receive time critical or recurring data from the device. The registration is done by assigning a function to a callback property of the device object. The available callback property and their type of parameters are described below.
Note
Using callbacks for recurring events is always preferred compared to using getters. It will use less USB bandwidth and the latency will be a lot better, since there is no round trip time.
-
event
BrickletIMUV3.AccelerationCallback→ sender, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- x – Type: Int16, Unit: 1 cm/s², Range: ?
- y – Type: Int16, Unit: 1 cm/s², Range: ?
- z – Type: Int16, Unit: 1 cm/s², Range: ?
This callback is triggered periodically with the period that is set by
SetAccelerationCallbackConfiguration(). The parameters are the acceleration for the x, y and z axis.
-
event
BrickletIMUV3.MagneticFieldCallback→ sender, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- x – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- y – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- z – Type: Int16, Unit: 1/16 µT, Range: [-40000 to 40000]
This callback is triggered periodically with the period that is set by
SetMagneticFieldCallbackConfiguration(). The parameters are the magnetic field for the x, y and z axis.
-
event
BrickletIMUV3.AngularVelocityCallback→ sender, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- x – Type: Int16, Unit: 1/16 °/s, Range: ?
- y – Type: Int16, Unit: 1/16 °/s, Range: ?
- z – Type: Int16, Unit: 1/16 °/s, Range: ?
This callback is triggered periodically with the period that is set by
SetAngularVelocityCallbackConfiguration(). The parameters are the angular velocity for the x, y and z axis.
-
event
BrickletIMUV3.TemperatureCallback→ sender, temperature¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- temperature – Type: Int16, Unit: 1 °C, Range: [-128 to 127]
This callback is triggered periodically with the period that is set by
SetTemperatureCallbackConfiguration(). The parameter is the temperature.
-
event
BrickletIMUV3.LinearAccelerationCallback→ sender, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- x – Type: Int16, Unit: 1 cm/s², Range: ?
- y – Type: Int16, Unit: 1 cm/s², Range: ?
- z – Type: Int16, Unit: 1 cm/s², Range: ?
This callback is triggered periodically with the period that is set by
SetLinearAccelerationCallbackConfiguration(). The parameters are the linear acceleration for the x, y and z axis.
-
event
BrickletIMUV3.GravityVectorCallback→ sender, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- x – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- y – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
- z – Type: Int16, Unit: 1 cm/s², Range: [-981 to 981]
This callback is triggered periodically with the period that is set by
SetGravityVectorCallbackConfiguration(). The parameters gravity vector for the x, y and z axis.
-
event
BrickletIMUV3.OrientationCallback→ sender, heading, roll, pitch¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- heading – Type: Int16, Unit: 1/16 °, Range: [0 to 5760]
- roll – Type: Int16, Unit: 1/16 °, Range: [-1440 to 1440]
- pitch – Type: Int16, Unit: 1/16 °, Range: [-2880 to 2880]
This callback is triggered periodically with the period that is set by
SetOrientationCallbackConfiguration(). The parameters are the orientation (heading (yaw), roll, pitch) of the IMU Brick in Euler angles. SeeGetOrientation()for details.
-
event
BrickletIMUV3.QuaternionCallback→ sender, w, x, y, z¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- w – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- x – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- y – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- z – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
This callback is triggered periodically with the period that is set by
SetQuaternionCallbackConfiguration(). The parameters are the orientation (w, x, y, z) of the IMU Brick in quaternions. SeeGetQuaternion()for details.
-
event
BrickletIMUV3.AllDataCallback→ sender, acceleration, magneticField, angularVelocity, eulerAngle, quaternion, linearAcceleration, gravityVector, temperature, calibrationStatus¶ Callback Output: - sender – Type: .NET Refnum (BrickletIMUV3)
- acceleration – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: ?
- 1: y – Type: Int16, Unit: 1 cm/s², Range: ?
- 2: z – Type: Int16, Unit: 1 cm/s², Range: ?
- magneticField – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- 1: y – Type: Int16, Unit: 1/16 µT, Range: [-20800 to 20800]
- 2: z – Type: Int16, Unit: 1/16 µT, Range: [-40000 to 40000]
- angularVelocity – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1/16 °/s, Range: ?
- 1: y – Type: Int16, Unit: 1/16 °/s, Range: ?
- 2: z – Type: Int16, Unit: 1/16 °/s, Range: ?
- eulerAngle – Type: Int16[3]
- 0: heading – Type: Int16, Unit: 1/16 °, Range: [0 to 5760]
- 1: roll – Type: Int16, Unit: 1/16 °, Range: [-1440 to 1440]
- 2: pitch – Type: Int16, Unit: 1/16 °, Range: [-2880 to 2880]
- quaternion – Type: Int16[4]
- 0: w – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 1: x – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 2: y – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- 3: z – Type: Int16, Unit: 1/16383, Range: [-214 + 1 to 214 - 1]
- linearAcceleration – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: ?
- 1: y – Type: Int16, Unit: 1 cm/s², Range: ?
- 2: z – Type: Int16, Unit: 1 cm/s², Range: ?
- gravityVector – Type: Int16[3]
- 0: x – Type: Int16, Unit: 1 cm/s², Range: ?
- 1: y – Type: Int16, Unit: 1 cm/s², Range: ?
- 2: z – Type: Int16, Unit: 1 cm/s², Range: ?
- temperature – Type: Int16, Unit: 1 °C, Range: [-128 to 127]
- calibrationStatus – Type: Byte, Range: [0 to 255]
This callback is triggered periodically with the period that is set by
SetAllDataCallbackConfiguration(). The parameters are as forGetAllData().
Virtual Functions¶
Virtual functions don't communicate with the device itself, but operate only on the API bindings device object. They can be called without the corresponding IP Connection object being connected.
-
BrickletIMUV3.GetAPIVersion() → apiVersion¶ Output: - apiVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
Returns the version of the API definition implemented by this API bindings. This is neither the release version of this API bindings nor does it tell you anything about the represented Brick or Bricklet.
-
BrickletIMUV3.GetResponseExpected(functionId) → responseExpected¶ Input: - functionId – Type: Byte, Range: See constants
Output: - responseExpected – Type: Boolean
Returns the response expected flag for the function specified by the function ID parameter. It is true if the function is expected to send a response, false otherwise.
For getter functions this is enabled by default and cannot be disabled, because those functions will always send a response. For callback configuration functions it is enabled by default too, but can be disabled by
SetResponseExpected(). For setter functions it is disabled by default and can be enabled.Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
- BrickletIMUV3.FUNCTION_SET_SENSOR_CONFIGURATION = 11
- BrickletIMUV3.FUNCTION_SET_SENSOR_FUSION_MODE = 13
- BrickletIMUV3.FUNCTION_SET_ACCELERATION_CALLBACK_CONFIGURATION = 15
- BrickletIMUV3.FUNCTION_SET_MAGNETIC_FIELD_CALLBACK_CONFIGURATION = 17
- BrickletIMUV3.FUNCTION_SET_ANGULAR_VELOCITY_CALLBACK_CONFIGURATION = 19
- BrickletIMUV3.FUNCTION_SET_TEMPERATURE_CALLBACK_CONFIGURATION = 21
- BrickletIMUV3.FUNCTION_SET_ORIENTATION_CALLBACK_CONFIGURATION = 23
- BrickletIMUV3.FUNCTION_SET_LINEAR_ACCELERATION_CALLBACK_CONFIGURATION = 25
- BrickletIMUV3.FUNCTION_SET_GRAVITY_VECTOR_CALLBACK_CONFIGURATION = 27
- BrickletIMUV3.FUNCTION_SET_QUATERNION_CALLBACK_CONFIGURATION = 29
- BrickletIMUV3.FUNCTION_SET_ALL_DATA_CALLBACK_CONFIGURATION = 31
- BrickletIMUV3.FUNCTION_SET_WRITE_FIRMWARE_POINTER = 237
- BrickletIMUV3.FUNCTION_SET_STATUS_LED_CONFIG = 239
- BrickletIMUV3.FUNCTION_RESET = 243
- BrickletIMUV3.FUNCTION_WRITE_UID = 248
-
BrickletIMUV3.SetResponseExpected(functionId, responseExpected)¶ Input: - functionId – Type: Byte, Range: See constants
- responseExpected – Type: Boolean
Changes the response expected flag of the function specified by the function ID parameter. This flag can only be changed for setter (default value: false) and callback configuration functions (default value: true). For getter functions it is always enabled.
Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
- BrickletIMUV3.FUNCTION_SET_SENSOR_CONFIGURATION = 11
- BrickletIMUV3.FUNCTION_SET_SENSOR_FUSION_MODE = 13
- BrickletIMUV3.FUNCTION_SET_ACCELERATION_CALLBACK_CONFIGURATION = 15
- BrickletIMUV3.FUNCTION_SET_MAGNETIC_FIELD_CALLBACK_CONFIGURATION = 17
- BrickletIMUV3.FUNCTION_SET_ANGULAR_VELOCITY_CALLBACK_CONFIGURATION = 19
- BrickletIMUV3.FUNCTION_SET_TEMPERATURE_CALLBACK_CONFIGURATION = 21
- BrickletIMUV3.FUNCTION_SET_ORIENTATION_CALLBACK_CONFIGURATION = 23
- BrickletIMUV3.FUNCTION_SET_LINEAR_ACCELERATION_CALLBACK_CONFIGURATION = 25
- BrickletIMUV3.FUNCTION_SET_GRAVITY_VECTOR_CALLBACK_CONFIGURATION = 27
- BrickletIMUV3.FUNCTION_SET_QUATERNION_CALLBACK_CONFIGURATION = 29
- BrickletIMUV3.FUNCTION_SET_ALL_DATA_CALLBACK_CONFIGURATION = 31
- BrickletIMUV3.FUNCTION_SET_WRITE_FIRMWARE_POINTER = 237
- BrickletIMUV3.FUNCTION_SET_STATUS_LED_CONFIG = 239
- BrickletIMUV3.FUNCTION_RESET = 243
- BrickletIMUV3.FUNCTION_WRITE_UID = 248
-
BrickletIMUV3.SetResponseExpectedAll(responseExpected)¶ Input: - responseExpected – Type: Boolean
Changes the response expected flag for all setter and callback configuration functions of this device at once.
Internal Functions¶
Internal functions are used for maintenance tasks such as flashing a new firmware of changing the UID of a Bricklet. These task should be performed using Brick Viewer instead of using the internal functions directly.
-
BrickletIMUV3.SetBootloaderMode(mode) → status¶ Input: - mode – Type: Byte, Range: See constants
Output: - status – Type: Byte, Range: See constants
Sets the bootloader mode and returns the status after the requested mode change was instigated.
You can change from bootloader mode to firmware mode and vice versa. A change from bootloader mode to firmware mode will only take place if the entry function, device identifier and CRC are present and correct.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
The following constants are available for this function:
For mode:
- BrickletIMUV3.BOOTLOADER_MODE_BOOTLOADER = 0
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE = 1
- BrickletIMUV3.BOOTLOADER_MODE_BOOTLOADER_WAIT_FOR_REBOOT = 2
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_REBOOT = 3
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_ERASE_AND_REBOOT = 4
For status:
- BrickletIMUV3.BOOTLOADER_STATUS_OK = 0
- BrickletIMUV3.BOOTLOADER_STATUS_INVALID_MODE = 1
- BrickletIMUV3.BOOTLOADER_STATUS_NO_CHANGE = 2
- BrickletIMUV3.BOOTLOADER_STATUS_ENTRY_FUNCTION_NOT_PRESENT = 3
- BrickletIMUV3.BOOTLOADER_STATUS_DEVICE_IDENTIFIER_INCORRECT = 4
- BrickletIMUV3.BOOTLOADER_STATUS_CRC_MISMATCH = 5
-
BrickletIMUV3.GetBootloaderMode() → mode¶ Output: - mode – Type: Byte, Range: See constants
Returns the current bootloader mode, see
SetBootloaderMode().The following constants are available for this function:
For mode:
- BrickletIMUV3.BOOTLOADER_MODE_BOOTLOADER = 0
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE = 1
- BrickletIMUV3.BOOTLOADER_MODE_BOOTLOADER_WAIT_FOR_REBOOT = 2
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_REBOOT = 3
- BrickletIMUV3.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_ERASE_AND_REBOOT = 4
-
BrickletIMUV3.SetWriteFirmwarePointer(pointer)¶ Input: - pointer – Type: Int64, Unit: 1 B, Range: [0 to 232 - 1]
Sets the firmware pointer for
WriteFirmware(). The pointer has to be increased by chunks of size 64. The data is written to flash every 4 chunks (which equals to one page of size 256).This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
-
BrickletIMUV3.WriteFirmware(data) → status¶ Input: - data – Type: Byte[64], Range: [0 to 255]
Output: - status – Type: Byte, Range: [0 to 255]
Writes 64 Bytes of firmware at the position as written by
SetWriteFirmwarePointer()before. The firmware is written to flash every 4 chunks.You can only write firmware in bootloader mode.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
-
BrickletIMUV3.WriteUID(uid)¶ Input: - uid – Type: Int64, Range: [0 to 232 - 1]
Writes a new UID into flash. If you want to set a new UID you have to decode the Base58 encoded UID string into an integer first.
We recommend that you use Brick Viewer to change the UID.
-
BrickletIMUV3.ReadUID() → uid¶ Output: - uid – Type: Int64, Range: [0 to 232 - 1]
Returns the current UID as an integer. Encode as Base58 to get the usual string version.
Constants¶
-
BrickletIMUV3.DEVICE_IDENTIFIER¶ This constant is used to identify a IMU Bricklet 3.0.
The
GetIdentity()function and theIPConnection.EnumerateCallbackcallback of the IP Connection have adeviceIdentifierparameter to specify the Brick's or Bricklet's type.
-
BrickletIMUV3.DEVICE_DISPLAY_NAME¶ This constant represents the human readable name of a IMU Bricklet 3.0.