Heute möchten wir euch von der langen Geschichte der Entwicklung des Silent Stepper Bricks berichten. Bei unserem aktuellen Stepper Brick erzeugt die Steuerung zusammen mit dem Motor, wie bei den meisten Standard-Schrittmotorsteuerungen ebenfalls, Resonanzen, die hörbar sind. Ursache dieser Resonanzen ist die Motorinduktivität verbunden mit einer einfachen Stromregelung. Im Vollschrittbetrieb sind die Geräusche meist am lautesten und werden mit steigenden Mikroschritten (1/4, 1/8,…) leiser. Je nach Anwendung können die Geräusche des Schrittmotors auch trotz Microstepping störend sein. Dies war der Grund für uns, sich mit der Entwicklung einer “leisen” Alternative zu beschäftigen, dem Silent Stepper Brick.
Entwicklung Teil 1

Da es sich um ein Brick handeln sollte, war die Größe des Silent Steppers vorgegeben: 4x4cm. Nach Abzug der notwendigen Fläche für die Stapelstecker, die Anschlüsse und dem Mikrocontroller blieb nur eine geringe Fläche für den eigentlichen Treiber übrig, so dass nur eine integrierte Treiberlösung in Betracht kam. Trinamic bietet mit dem TMC2100 ein Treiber-IC an, welcher verschiedene Stromregelungen unterstützt und einen geräuschlosen Betrieb ermöglicht (Stealth Chop). Der Treiber unterstützt einen maximalen Phasenstrom von bis zu 1,2A (Dauerstrom bei guter Kühlung) und bis zu 256 Mikroschritten. Motoren können somit sehr präzise bewegt werden. Unsere angebotenen Schrittmotoren sind genau für diese Ströme ausgelegt.
Mit dem TMC2100 Treiber begannen wir die Entwicklung unseres Prototypen. Der erste Prototyp hatte Probleme bei höheren Motorgeschwindigkeiten: Irgendwann brach das Drehmoment zusammen und der Motor stoppte schlagartig beim Beschleunigen. Nach längerer Fehlersuche gab es hierfür zwei Gründe:
-
Unser Layout der Leiterplatte war nicht optimal, so dass wir einen neuen Prototypen entwickeln mussten.
-
Schrittmotoren besitzen eine Resonanzfrequenz. Wenn man in diese hereingerät, dann bricht das Drehmoment schlagartig zusammen. Man löst dieses Problem indem man schnell über diesen Bereich hinweg beschleunigt. Auf Grund der Probleme mit dem Layout war uns erst nicht klar das wir dort ein ganz normales Phänomen sehen, wir haben lange Zeit gedacht es gibt noch weitere Probleme mit dem Layout o.ä.
Nachdem wir diese Probleme überwunden hatten und die Entwicklung fast zu 100% abgeschlossen war, gab es eine Preisanpassung bei den Treibern: Neben dem TMC2100 gibt es den TMC2130. Dieser Treiber besitzt deutlich mehr Einstellungsmöglichkeiten und viele weitere spannende Features. Als wir mit der Entwicklung begonnen haben war der TMC2130 noch deutlich teurer als der TMC2100. Daher hatten wir uns für den einfacheren TMC2100 entschieden. Da nun aber die beiden Treiber nahezu gleich teuer sind, beschlossen wir den TMC2130 zu nutzen. Damit begann die Entwicklung quasi von vorne.
Der TMC2100 wurde recht simpel über wenige Pins konfiguriert. So gab es auch nur wenig Einstellungsmöglichkeiten. Der TMC2130 verfügt über eine SPI Schnittstelle und erheblich mehr Einstellungsmöglichkeiten. Die Software musste dafür zum großen Teil komplett neu geschrieben werden und es mussten Erfahrungen mit den verschiedenen Einstellungsmöglichkeiten gewonnen werden. Da es sich bei dem Silent Stepper Projekt allgemein um ein niedrig priorisiertes Projekt handelte, führte dies dazu, dass sich das Projekt hinzog. Viele Erfahrungen konnte man auch erst während der Entwicklung gewinnen. So besitzt der TMC2130 zum Beispiel eine interne Clock, mit der die Stromregelung usw. durchgeführt wird. Je nach Anwendung ist diese aber zu ungenau, da sie unter anderem sehr temperaturabhängig ist. Für Anwendungsbereiche die eine höhere Präzision erfordern verfügt der IC über einen externen Takteingang, den wir über den Prozessor mit einem präzisem Taktsignal versorgen. Dafür war natürlich ein weiterer Prototyp notwendig.
EMV Labor
Während der Entwicklung unserer Produkte prüfen wir auch die elektromagnetische Verträglichkeit. Da das Design und die Software einen großen Einfluss darauf haben, kann diese abschließend erst am Ende der Entwicklungsphase durchgeführt werden. So haben zum Beispiel Taktleitungen, Busleitungen usw. einen Einfluss.
Bisher besuchten wir dazu öfters ein EMV Labor. Da Messungen im Labor aber vergleichsweise teuer sind und auch viel Zeit kosten, haben wir uns ein eigenes kleines Labor eingerichtet.


Dazu nutzen wir einen Rigol DSA815 Spektrumanalyzer, eine TEM Zelle und ein großes Metallgehäuse um den Messaufbau etwas zu schirmen. Mit diesem Aufbau erreicht man längst nicht die Messqualität, die man in einem richtigen EMV Labor erreicht. Man kann aber erkennen, falls es Messwerte gibt, die die zulässigen Grenzwerte überschreiten könnten. Somit können Probleme oftmals schon vor den Tests im EMV Labor erkannt werden.
Der Spektrumanalyzer zeigt für den ausgewählten Frequenzbereich, die jeweils zur Frequenz gehörene Amplitude. Sprich die Stärke der Abstrahlung zu jeder einzelnen Frequenz. Ohne Abschirmung misst man zusätzlich zu der Störausstrahlung des Testobjekts aber auch Radiosender, das GSM Netz, Funkfernbedienungen usw. Mit unserer primitiven Abschirmung werden diese externe Quellen etwas abgeschirmt.
Es kann vorkommen, dass eine Signalleitung, die mit einer bestimmten Frequenz getaktet wird, abstrahlt. Typischerweise sieht man dann Frequenzvielfache dieser Leitung auf dem Spektrumanalyzer. In dem nachfolgenden Foto sind zum Beispiel Vielfache einer Frequenz von 12,8 MHz erkennbar.
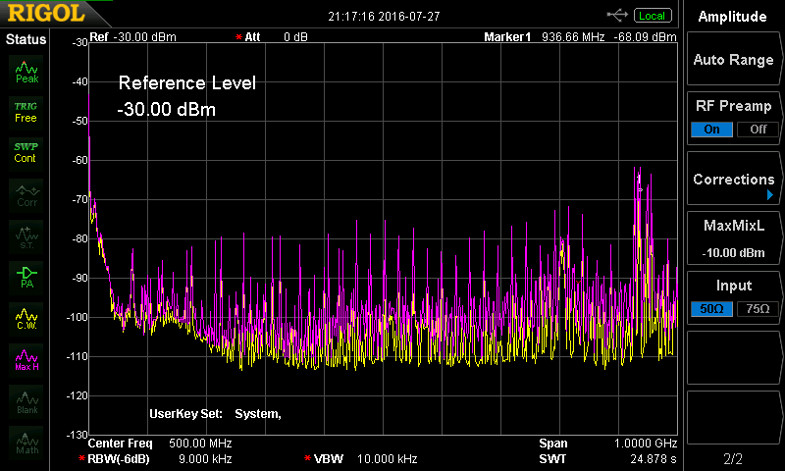
Erkennt man diese Vielfache, dann kann man einfach feststellen wer wohl der Verursacher ist, wenn die Grundfrequenz nur an einer Steller der Schaltung genutzt wird. Über sogenannte Nahfeldsonden, Antennen mit denen man örtlich begrenzt die Abstrahlung messen kann, kann man dann sehr zielgenau die verursachende Leiterbahn lokalisieren. Das Aussenden von Störungen kann verschiedene Gründe haben: Schlechte Leiterbahnführung, zu steile Signalflanken, Masseprobleme usw. Manchmal hat man die Möglichkeit über eine Änderung von Bauteilen die Abstrahlung zu beeinflussen (Beispiel: Serienwiderstand in einer Taktleitung). Oftmals muss aber auch das Layout überarbeitet werden, so dass eine neue Leiterkarte benötigt wird.
Entwicklung Teil 2
Leider nicht ganz ohne Grund haben wir zuvor geschrieben wie wir die Messungen zur Störausstrahlung hier bei uns durchführen. Die Entwicklung des Silent Stepper Bricks war fast vollständig abgeschlossen und wir standen kurz davor die Leiterkarten zu bestellen um die Silent Stepper Bricks noch dieses Jahr produzieren zu können. Als letzten Schritt prüften wir den Silent Stepper hinsichtlich seiner Störausstrahlung. Dazu nutzten wir für erste Tests unser eigenes kleines Labor. Leider sahen die Messergebnisse nicht so aus wie wir es erhofft haben.
Man sah deutlich die Vielfache des Taktsignals (siehe Bild oben). Die Vielfachen waren zwar knapp unter den eingestellten Grenzwert aber das Risiko damit im Labor durchzufallen war uns einfach zu groß. Auch ist unser Anspruch, ein vernünftiges Design zu machen bei dem so welche Peaks nicht vorkommen.
Wir hatten extra einen Serienwiderstand eingeplant um die Flankensteilheit des Taktsignals einstellen zu können, mit der Hoffnung damit die Störaussendung des Signals zu kontrollieren. Leider ließen sich damit die Effekte nicht weit genug reduzieren. Also bestellten wir Leiterkarten für einen weiteren Prototypen. Mit jedem Prototypen vergehen aber mindestens zwei weitere Wochen. Dazu kommt ein Tag, den man zum Aufbau benötigt und dann meist 1/2 - 1 Tag um alle Lötfehler zu finden.
Von den neuen Prototypen bestellten wir direkt zwei Varianten eine mit einer besseren Taktsignal-Leiterbahnführung und mehr Filtermöglichkeiten und eine Variante, die ein ganz anderes Masselagenlayout besitzt. Bei den Prüfungen stellte sich heraus, das unsere Überlegungen zu den Masselagen schon korrekt waren (die Änderungen führten zu einer Verschlechterung) und wir konnten über die neuen Filtermöglichkeiten die Störungen weiter minimieren. Damit ist nun sichergestellt, das wir die notwendigen Grenzwerte locker einhalten.
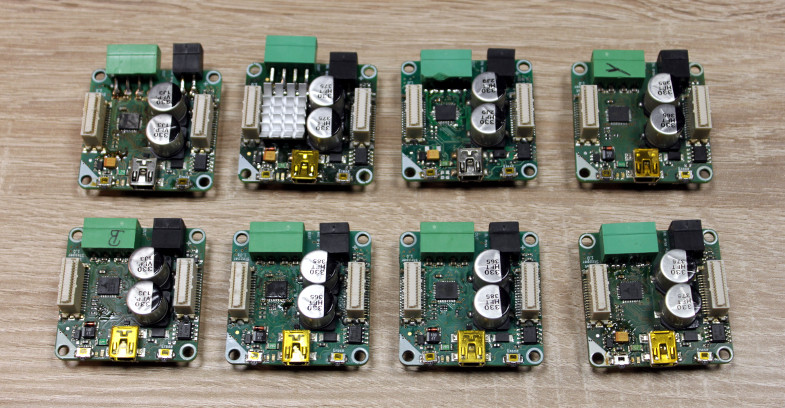
In Summe haben wir 8 Prototypen für die Entwicklung des Silent Stepper Brick benötigt:
Wie geht es nun weiter?
Die Leiterkarten werden nun vorbereitet und nächste Woche bestellt. Wegen Weihnachten und Neujahr wird sich die Lieferung der Karten verzögern, so dass wir davon ausgehen Anfang März den Silent Stepper Bricks offiziell vorstellen zu können. Freut euch auf ein tolles Vergleichsvideo zwischen alten und neuem Stepper Brick.