Stepper Brick¶

Bemerkung
Der Stepper Brick ist abgekündigt und wird nicht mehr verkauft. Als Ersatz werden der Silent Stepper Brick und das Silent Stepper Bricklet 2.0 empfohlen.
Features¶
Steuert einen bipolaren Schrittmotor über USB (max. 38V, 2,5A pro Phase)
API für viele Programmiersprachen verfügbar
Position, Geschwindigkeit und Beschleunigung sind steuerbar
Voll-, Halb-, Viertel- und Achtelschritt
Konfigurierbarer Decay Modus
Erweiterbar über zwei Bricklet Anschlüsse
Beschreibung¶
Mit dem Stepper Brick kann einen bipolaren Schrittmotor mit einem maximalen Strom von 2,5A und einer maximalen Spannung von 38V pro Phase über USB gesteuert werden. Eine API für viele Programmiersprachen ermöglicht das Steuern der Richtung, Geschwindigkeit und Beschleunigung des Motors.
Der maximale Treiberstrom und der Decay Modus können ebenfalls per Software über die API eingestellt werden. Der Stromverbrauch und die Versorgungsspannung können über diese auch gemessen werden.
Über zwei Anschlüsse können Bricklets angeschlossen werden, die die Fähigkeiten des Bricks erweitern. Der Stepper Brick kann mit anderen Bricks in einem Stapel genutzt werden. Zum Beispiel kann ein zusätzlicher Master Brick mit Master Extensions genutzt werden, um die USB Verbindung durch andere kabelgebundene Schnittstellen (RS485, Ethernet) oder drahtlose Schnittstellen (WLAN) zu ersetzen.
Der Schrittmotor kann über eine externe Stromversorgung (schwarze Stromversorgungsbuchse) oder durch den Stapel versorgt werden. Der Brick schaltet automatisch auf die externe Stromversorgung um, sobald diese angeschlossen wird.
Technische Spezifikation¶
Eigenschaft |
Wert |
|---|---|
Maximaler Motorstrom pro Phase |
2,5A |
Minimale/Maximale Eingangsspannung |
8V/38V |
Schrittmodi |
Voll-, Halb-, Viertel- oder Achtelschritte |
Decay Modi |
Slow Decay, Fast Decay oder konfigurierbares Mixed Decay |
Maximale Geschwindigkeit |
0 bis 65535, konfigurierbar als Grenze, in Schritten/s |
Maximale Beschleunigung |
0 bis 65535, konfigurierbar als Grenze, in Schritten/s² |
Bricklet Anschlüsse |
2 |
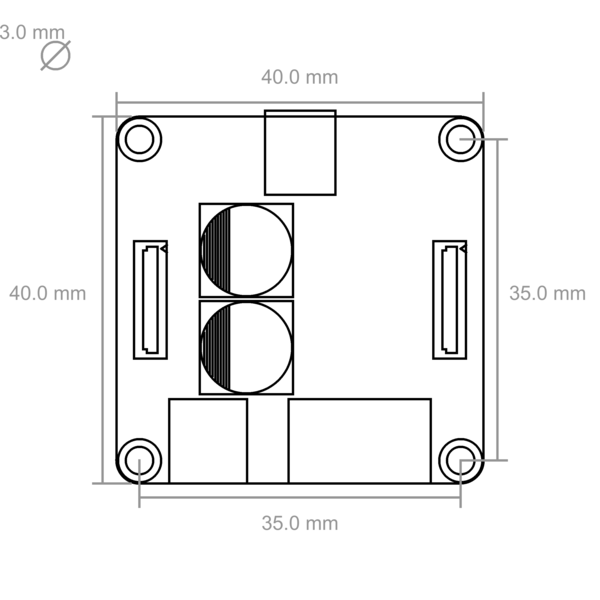
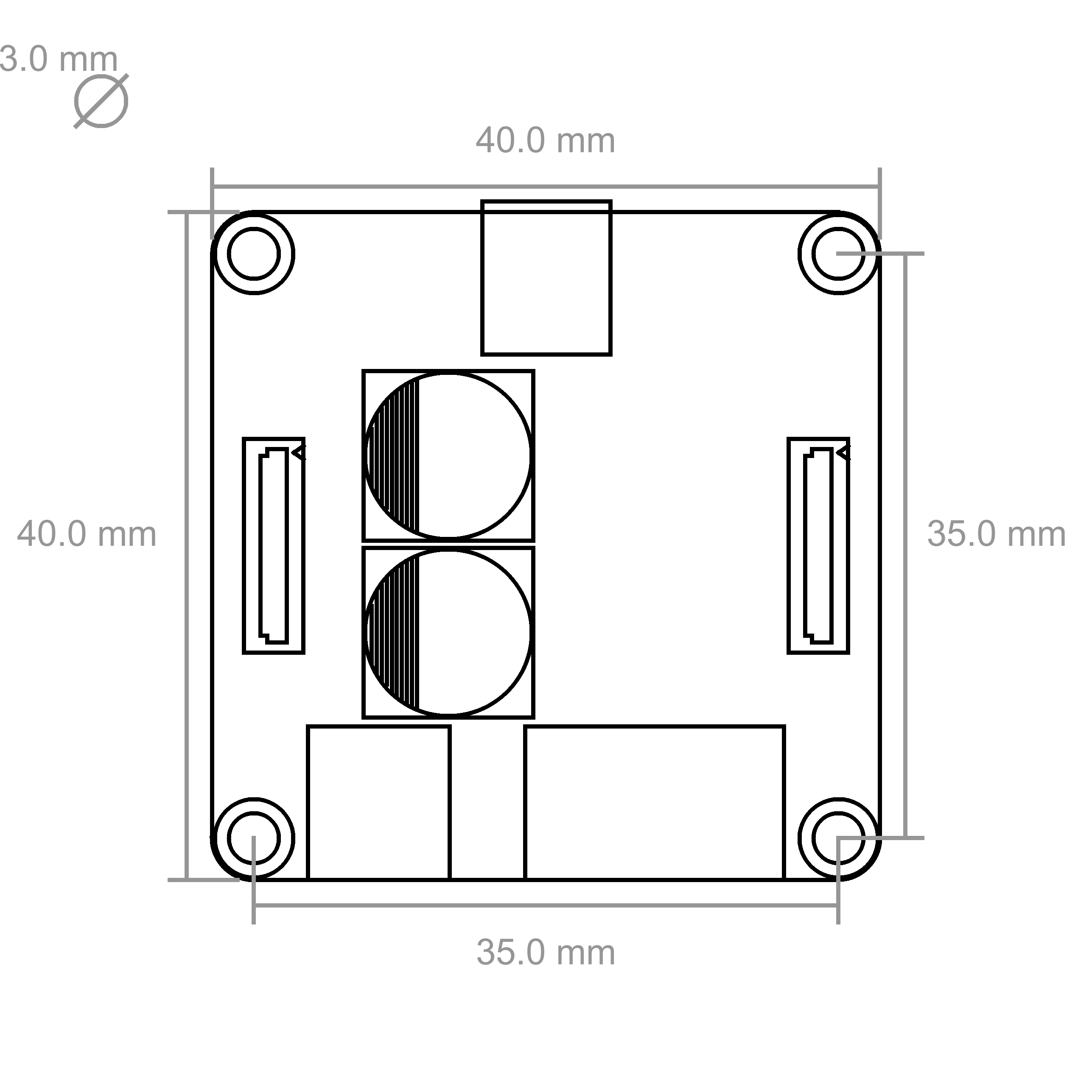
Abmessungen (B x T x H) |
40 x 40 x 17mm (1,57 x 1,57 x 0,67") |
Gewicht |
20g |
Stromverbrauch |
60mA |
Ressourcen¶
{kind=link}
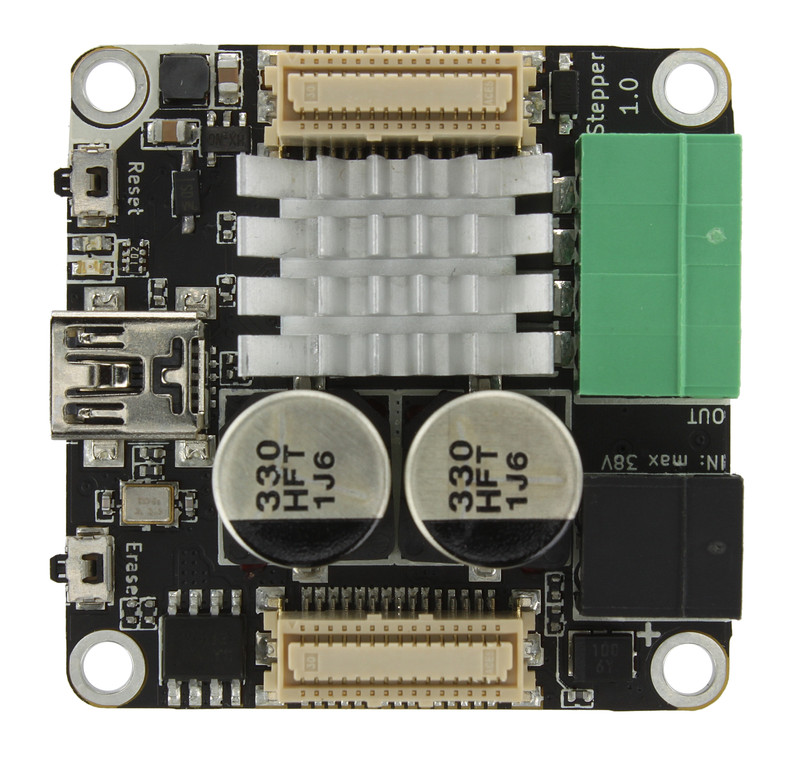
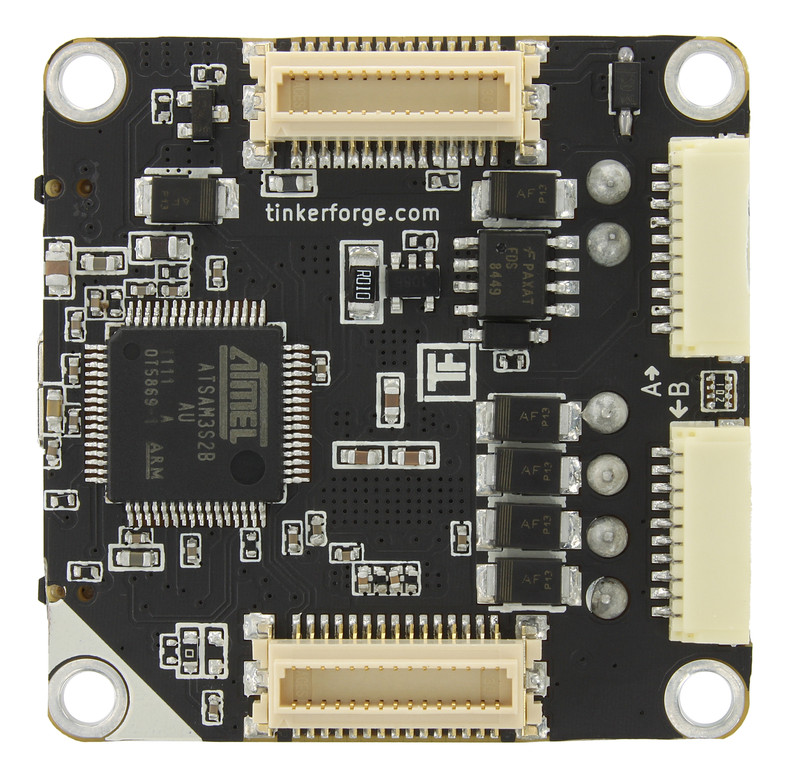
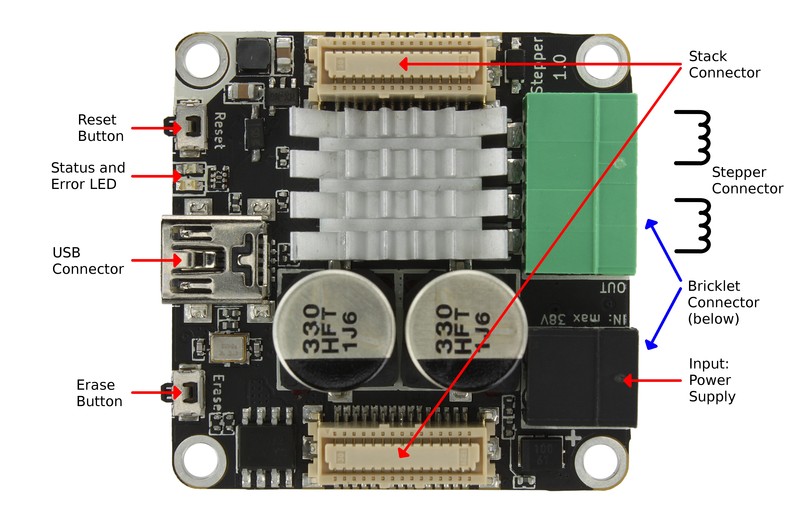
Anschlussmöglichkeit¶
Das folgende Bild zeigt die verschiedenen Anschlussmöglichkeiten des Stepper Bricks.
Erster Test¶
Um einen Stepper Brick testen zu können, müssen zuerst Brick Daemon und Brick Viewer installiert werden. Brick Daemon arbeitet als Proxy zwischen der USB Schnittstelle der Bricks und den API Bindings. Brick Viewer kann sich mit Brick Daemon verbinden, gibt Informationen über die angeschlossenen Bricks und Bricklets aus und ermöglicht es diese zu testen.
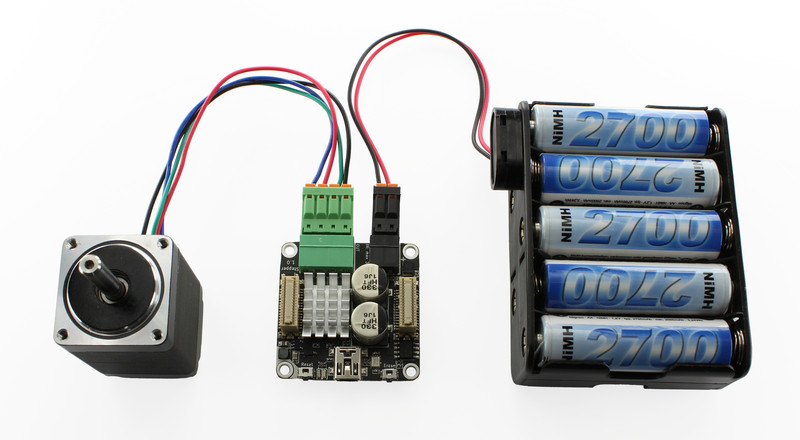
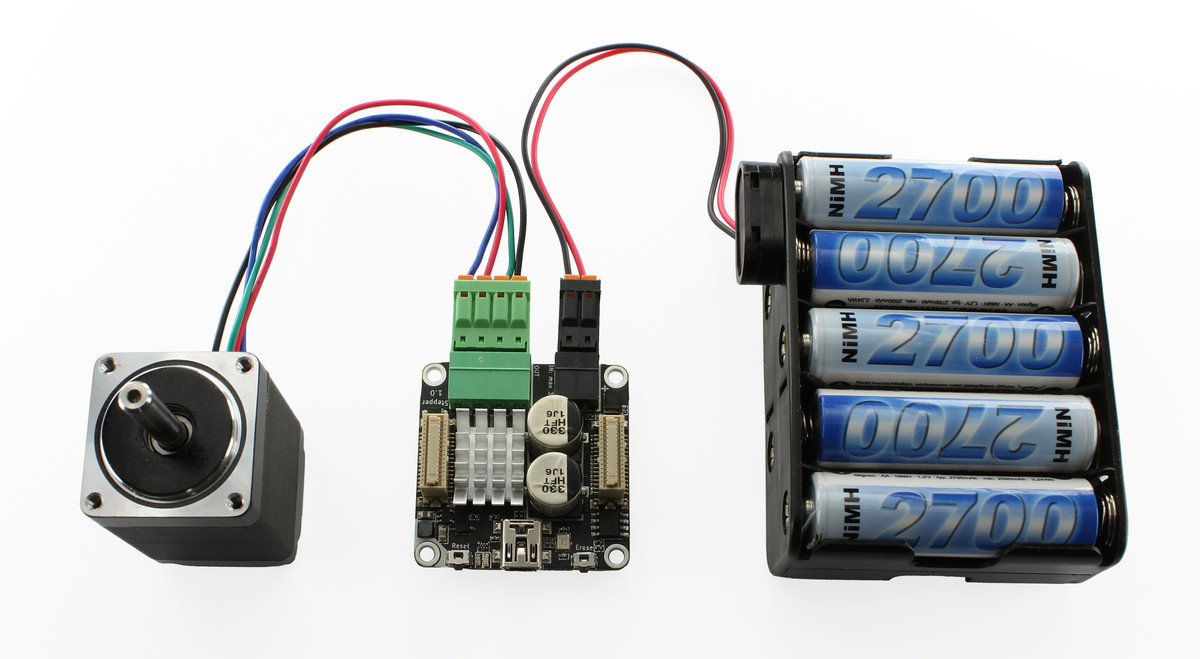
Schließe einen Schrittmotor und eine passende Stromversorgung an den Brick an. Der Aufbau sollte dem im folgenden Bild ähnlich sehen.
Wenn der Brick per USB an den PC angeschlossen wird sollte einen Moment später im Brick Viewer ein neuer Tab namens "Stepper Brick" auftauchen. Wähle diesen Tab aus.
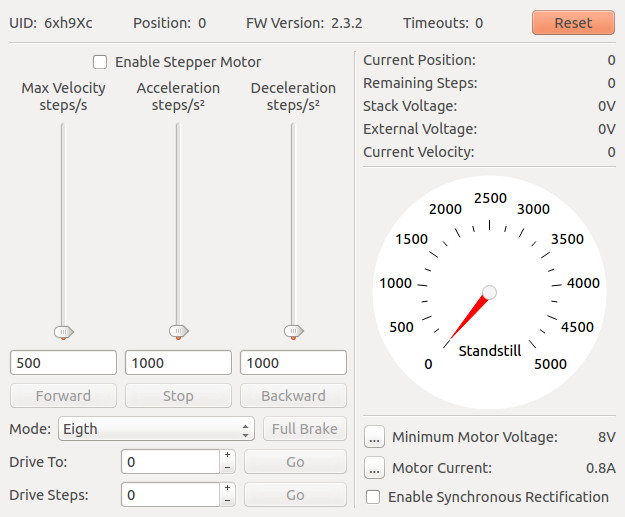
Auf der linken Seite des Tabs kann die Treiberstufe ein- und ausgeschaltet, sowie die maximale Geschwindigkeit, Beschleunigung und Verzögerung eingestellt werden. Darunter sind drei Knöpfe um die Drehrichtung des Schrittmotors zu kontrollieren sowie diesen zu stoppen. Wenn der "Forward" Kopf geklickt wird, dann wird die Geschwindigkeit des Schrittmotors bis zur "Max Velocity" mit der eingestellten Beschleunigung erhöht. Ein Klick auf den "Stop" Knopf verringert die Geschwindigkeit auf "0" mit der eingestellten Verzögerung.
Weiter unten kann die Schrittmodus (Voll-, Halb-, Viertel- und Achtelschritt) eingestellt sowie eine Vollbremsung ausgelöst werden, die den Motor sofort anhält.
Alternativ kann der Schrittmotor auch zu einer bestimmten Position (gemessen in Schritten) gefahren werden. Dazu einfach bei "Drive To" die Position eingeben und "Go" klicken. Der Schrittmotor kann ebenfalls eine bestimmte Anzahl Schritte gefahren werden. Bei diesen beiden Fahrweisen werden auch die Einstellungen für die maximale Geschwindigkeit, Beschleunigung und Verzögerung berücksichtigt.
Auf der rechten Seite werden die aktuelle Position, die noch zu fahrenden Schritte sowie die Versorgungsspannung des Stapels und die externe Versorgungsspannung angezeigt. Darunter befindet sich eine Tachometer zur Darstellung der Motorgeschwindigkeit. Ganz unten kann die Mindestspannung des Motors eingestellt werden. Wird diese unterschritten wird der Undervoltage Callback ausgelöst. Zusätzlich kann auch noch der Motorstrom entsprechend des angeschlossenen Motors eingestellt werden.
Nun kann ein eigenes Programm geschrieben werden. Der Abschnitt Programmierschnittstelle listet die API des Stepper Brick und Beispiele in verschiedenen Programmiersprachen auf.
Stromversorgung¶
Der angeschlossene Motor kann über den schwarzen Stromversorgungsstecker auf der Platine extern versorgt werden. Alternativ kann eine Stromversorgung unter den Brick gesteckt werden. Der Brick schaltet von selbst auf die externe Versorgung um, wenn am schwarzen Stecker eine Spannung anliegt.
Decay Modi¶
Für eine gute Erläuterung der verschiedenen Decay Modi siehe diesen Blogeintrag (Englisch) von Avayan oder diesen Blogeintrag (Deutsch) von T. Ostermann.
Der richtige Decay Modus ist unglücklicherweise für jeden Schrittmotor anders. Der beste Weg einen guten Decay Modus für deinen Schrittmotor zu ermitteln ist die Stromaufnahme des Motors mit einem Oszilloskop zu messen. Der zweitbeste Weg ist es auf die Geräusche des Motors zu hören. Wenn der Wert zu klein ist dann ist häufig ein hoher Ton zu hören. Ist dagegen der Wert zu groß dann ist häufig ein ein Brummgeräusch zu hören.
Im Allgemeinen ist der Fast Decay Modus (kleine Werte) geräuschvoller, erlaubt aber höhere Motorgeschwindigkeiten.
Fehler LED¶
Die rote LED leuchtet wenn die Versorgungsspannung unter das einstellbaren Minimum fällt.
Programmierschnittstelle¶
Siehe Programmierschnittstelle für eine detaillierte Beschreibung.
Sprache |
API |
Beispiele |
Installation |
|---|---|---|---|
C/C++ |
|||
C# |
|||
Delphi/Lazarus |
|||
Go |
|||
Java |
|||
JavaScript |
|||
LabVIEW |
|||
Mathematica |
|||
MATLAB/Octave |
|||
MQTT |
|||
openHAB |
|||
Perl |
|||
PHP |
|||
Python |
|||
Ruby |
|||
Rust |
|||
Shell |
|||
Visual Basic .NET |
|||
TCP/IP |
|||
Modbus |
FAQ¶
Schrittmotor macht komische Geräusche¶
Schrittmotoren können hohe oder Brummtöne erzeugen, selbst im Stillstand, wenn der Decay Modus nicht passen für den angeschlossenen Motor eingestellt ist.
Der Decay Modus kann, wie hier beschrieben, möglicherweise besser für den verwendeten Schrittmotor eingestellt werden.