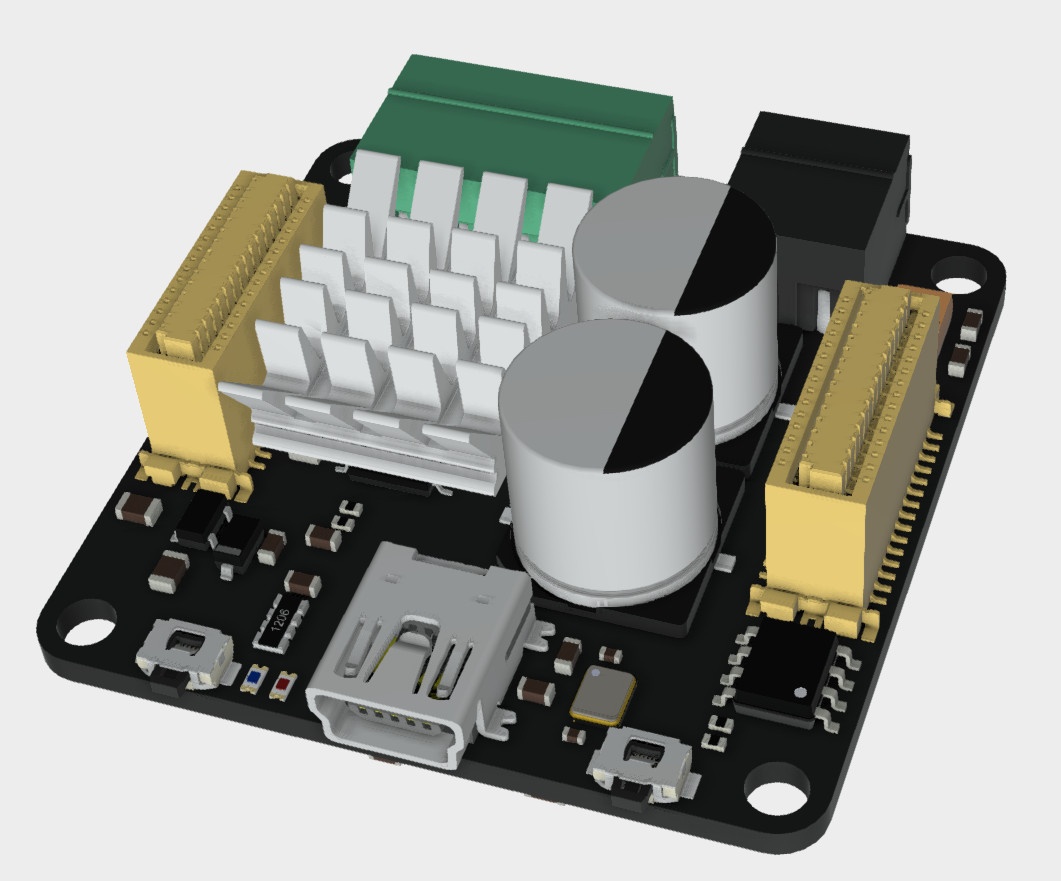
Nach einer langen Entwicklungsphase haben wir heute den Silent Stepper Brick veröffentlicht.
Bisher ist es nur möglich gewesen mit dem Stepper Brick Schrittmotoren zu steuern. Mit dem Silent Stepper Brick bieten wir ab heute eine Alternative an. Im Vergleich zum Stepper Brick bietet der Silent Stepper Brick einen Modus um Motore lautlos zu bewegen und bietet eine Auflösung von 1/256 Schritten.
Der Silent Stepper Brick hat 3 Modi.
- Stealth Mode: Vollständig Lautlos
- Coolstep Mode: Energie Optimierungen
- Classic Mode: Maximaler Drehmoment
Im Stealth Modus wird der Schrittmotor nahezu lautlos mit so wenig Vibration wie möglich betrieben. Der Modus ist nutzbar für niedrige bis mittlere Geschwindigkeiten. Im Coolstep Modus wird der Stromverbrauch automatisch reduziert, falls wegen geringer Last nicht die volle Leistung notwendig ist. Damit wird sichergestellt, dass so wenig Wärme wie möglich produziert wird. Ist ein maximaler Drehmoment notwendig, so kann der Silent Stepper Brick im Classic Modus betrieben werden. Dieser Modus ist sehr ähnlich zu der Art, wie der Stepper Brick Motoren ansteuert.
Für die drei Modi können Geschwindigkeits-Grenzwerte definiert werden. Erreicht die Motorgeschwindigkeit einen dieser Grenzwerte, wechselt der Brick von einem Modus in einen anderen. Normalerweise wird dies benutzt um lautlos im Stillstand oder bei niedrigen Geschwindigkeiten zu sein (Stealth Modus) aber für schnelle Motorgeschwindigkeiten das maximale Drehmoment zu haben (Classic Mode).
Ein weitere Besonderheit ist der sogenannte Stallguard. Mit Stallguard kann genutzt werden um die Motorlast zu messen und eine drohende Blockierung des Motors zu erkennen. Im Coolstep Modus ist Stallguard automatisch aktiviert um den Motorstrom an die aktuelle Motorlast anzupassen.
Mit der kleinen Schrittgröße von bis zu 1/256-Schritten können Schrittmotore extrem gleichmäßig und präzise bewegt werden. Sollen hohe Geschwindigkeiten, wie zum Beispiel 10000 Voll-Schritte pro Sekunde, erreicht werden wäre eine Schrittgröße von 1/256-Schritten nicht machbar. Dazu wären nämlich 2.560.000 Schritte pro Sekunde notwendig. Das von uns festgelegte Limit für den Silent Stepper Brick liegt bei 65535 Schritten pro Sekunde. Für Anwendungen die hohe Geschwindigkeit und kleine Schritte benötigen bietet der Brick aber eine Schritt-Interpolation. Wird diese aktiviert, so kann der Motor mit 10000 Voll-Schritten bewegt werden, der Treiber führt diese intern aber mit 1/256 Subschritten aus.
Der Silent Stepper Brick ist ab sofort in unserem Shop für 59,99€ inkl. MwSt. verfügbar.
Wir haben auch ein kleines Geräuschvergleichsvideo gemacht: