Bricks¶
|
|
|
|
|
|
|
Bricks are the base modules of each Tinkerforge system. Different Bricks can be used in one system, but each system requires one Brick as a minimum. Bricks can have their own features (sensors, actuators), but the main purpose of Bricks is to attach Bricklets to the system. For that each Brick has multiple Bricklet connectors.
Many Bricks can be remotely controlled by external devices, such as (embedded) PCs, over interfaces such as USB-C, WIFI or Ethernet. The external device than runs your program which controls the system by our API.
There are Bricks that can be attached to a Raspberry Pi (HAT Brick, HAT Zero Brick), such that that your software on the Raspberry Pi can control the attached hardware directly.
Master Bricks, a special type of Bricks with USB-C interface, can be assembled into a stack (see description of stack concept). The USB interface of a Master Brick can be replaced by Wi-Fi, Ethernet or RS485 using Master Extensions. In conjunction with the stack concept all Bricks and Bricklets can be controlled by Wi-Fi or Ethernet instead of by USB.
There is an extra section for discontinued Bricks.
Name |
Description |
|---|---|
For Firmware Developers: JTAG and serial console |
|
ESP32 microcontroller based Brick with 6 Bricklet ports |
|
ESP32 microcontroller based Brick with Ethernet and 6 Bricklet ports |
|
HAT for Raspberry Pi with 8 Bricklets ports and real-time clock |
|
HAT for Raspberry Pi Zero with 4 Bricklets ports |
|
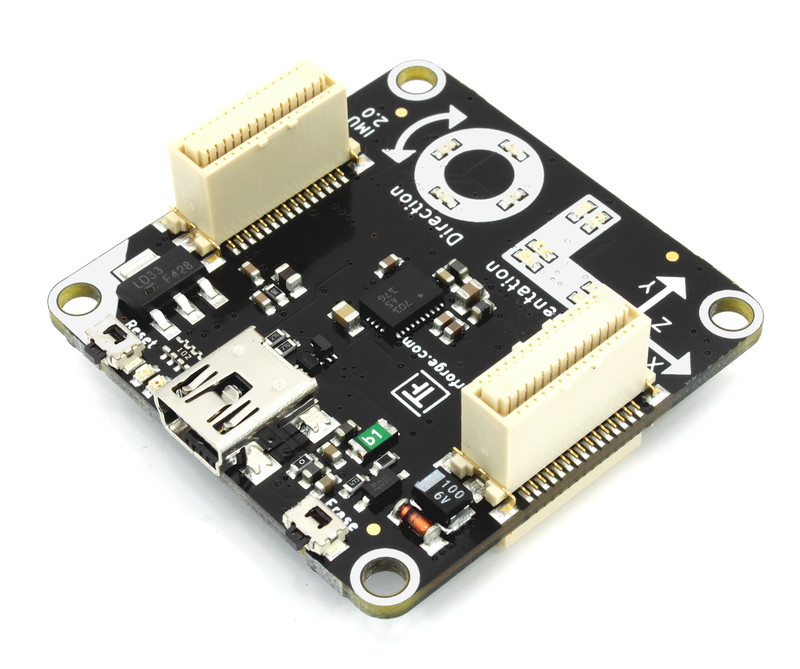
Full fledged AHRS with 9 degrees of freedom |
|
Basis to build stacks and has 4 Bricklet ports |
|
Executes user programs and controls other Bricks/Bricklets standalone |
|
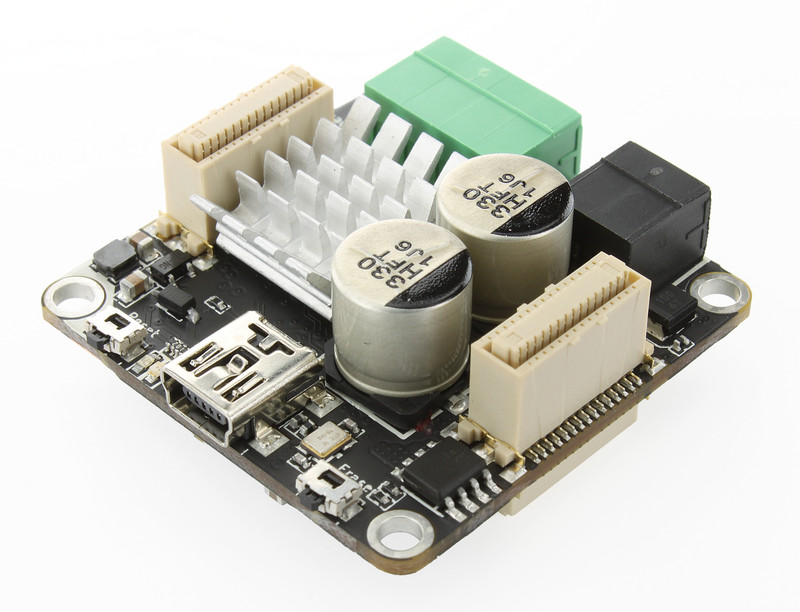
Silently drives one bipolar stepper motor with up to 46V and 1.6A per phase |