- Getting Started
- Hardware
- Software
- Kits
- Embedded Boards
- Specifications
- Technical Data
- TCP/IP Protocol
- Modbus Protocol
- Protocol
- API
- Bricks
- Bricks (Discontinued)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Discontinued)
- Wireshark Dissector
- Saleae Logic High Level Analyzer
Modbus - Accelerometer Bricklet 2.0¶
This is the description of the Modbus protocol for the Accelerometer Bricklet 2.0. General information and technical specifications for the Accelerometer Bricklet 2.0 are summarized in its hardware description.
API¶
A general description of the Modbus protocol structure can be found here.
Basic Functions¶
- BrickletAccelerometerV2.get_acceleration¶
Function ID: - 1
Request: - empty payload
Response: - x – Type: int32, Unit: 1/10000 gₙ, Range: ?
- y – Type: int32, Unit: 1/10000 gₙ, Range: ?
- z – Type: int32, Unit: 1/10000 gₙ, Range: ?
Returns the acceleration in x, y and z direction. The values are given in gₙ/10000 (1gₙ = 9.80665m/s²). The range is configured with
set_configuration.If you want to get the acceleration periodically, it is recommended to use the
CALLBACK_ACCELERATIONcallback and set the period withset_acceleration_callback_configuration.
- BrickletAccelerometerV2.set_configuration¶
Function ID: - 2
Request: - data_rate – Type: uint8, Range: See meanings, Default: 7
- full_scale – Type: uint8, Range: See meanings, Default: 0
Response: - no response
Configures the data rate and full scale range. Possible values are:
Data rate of 0.781Hz to 25600Hz.
Full scale range of ±2g up to ±8g.
Decreasing data rate or full scale range will also decrease the noise on the data.
The following meanings are defined for the elements of this function:
For data_rate:
0 = 0.781Hz
1 = 1.563Hz
2 = 3.125Hz
3 = 6.2512Hz
4 = 12.5Hz
5 = 25Hz
6 = 50Hz
7 = 100Hz
8 = 200Hz
9 = 400Hz
10 = 800Hz
11 = 1600Hz
12 = 3200Hz
13 = 6400Hz
14 = 12800Hz
15 = 25600Hz
For full_scale:
0 = 2g
1 = 4g
2 = 8g
- BrickletAccelerometerV2.get_configuration¶
Function ID: - 3
Request: - empty payload
Response: - data_rate – Type: uint8, Range: See meanings, Default: 7
- full_scale – Type: uint8, Range: See meanings, Default: 0
Returns the configuration as set by
set_configuration.The following meanings are defined for the elements of this function:
For data_rate:
0 = 0.781Hz
1 = 1.563Hz
2 = 3.125Hz
3 = 6.2512Hz
4 = 12.5Hz
5 = 25Hz
6 = 50Hz
7 = 100Hz
8 = 200Hz
9 = 400Hz
10 = 800Hz
11 = 1600Hz
12 = 3200Hz
13 = 6400Hz
14 = 12800Hz
15 = 25600Hz
For full_scale:
0 = 2g
1 = 4g
2 = 8g
- BrickletAccelerometerV2.set_info_led_config¶
Function ID: - 6
Request: - config – Type: uint8, Range: See meanings, Default: 0
Response: - no response
Configures the info LED (marked as "Force" on the Bricklet) to be either turned off, turned on, or blink in heartbeat mode.
The following meanings are defined for the elements of this function:
For config:
0 = Off
1 = On
2 = Show Heartbeat
- BrickletAccelerometerV2.get_info_led_config¶
Function ID: - 7
Request: - empty payload
Response: - config – Type: uint8, Range: See meanings, Default: 0
Returns the LED configuration as set by
set_info_led_configThe following meanings are defined for the elements of this function:
For config:
0 = Off
1 = On
2 = Show Heartbeat
Advanced Functions¶
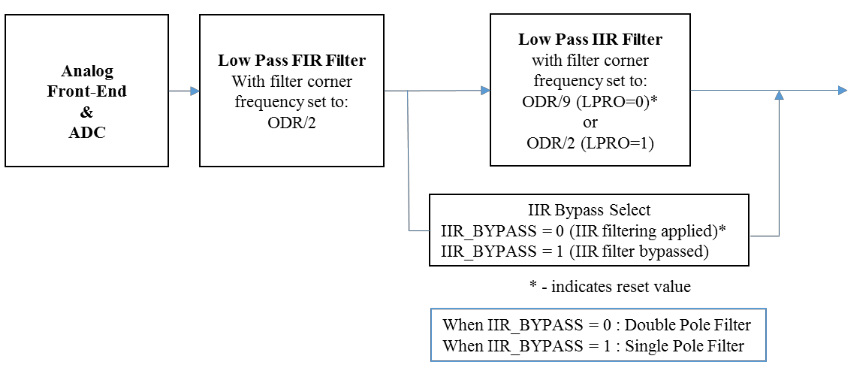
- BrickletAccelerometerV2.set_filter_configuration¶
Function ID: - 13
Request: - iir_bypass – Type: uint8, Range: See meanings, Default: 0
- low_pass_filter – Type: uint8, Range: See meanings, Default: 0
Response: - no response
Configures IIR Bypass filter mode and low pass filter roll off corner frequency.
The filter can be applied or bypassed and the corner frequency can be half or a ninth of the output data rate.
New in version 2.0.2$nbsp;(Plugin).
The following meanings are defined for the elements of this function:
For iir_bypass:
0 = Applied
1 = Bypassed
For low_pass_filter:
0 = Ninth
1 = Half

- BrickletAccelerometerV2.get_filter_configuration¶
Function ID: - 14
Request: - empty payload
Response: - iir_bypass – Type: uint8, Range: See meanings, Default: 0
- low_pass_filter – Type: uint8, Range: See meanings, Default: 0
Returns the configuration as set by
set_filter_configuration.New in version 2.0.2$nbsp;(Plugin).
The following meanings are defined for the elements of this function:
For iir_bypass:
0 = Applied
1 = Bypassed
For low_pass_filter:
0 = Ninth
1 = Half
- BrickletAccelerometerV2.get_spitfp_error_count¶
Function ID: - 234
Request: - empty payload
Response: - error_count_ack_checksum – Type: uint32, Range: [0 to 232 - 1]
- error_count_message_checksum – Type: uint32, Range: [0 to 232 - 1]
- error_count_frame – Type: uint32, Range: [0 to 232 - 1]
- error_count_overflow – Type: uint32, Range: [0 to 232 - 1]
Returns the error count for the communication between Brick and Bricklet.
The errors are divided into
ACK checksum errors,
message checksum errors,
framing errors and
overflow errors.
The errors counts are for errors that occur on the Bricklet side. All Bricks have a similar function that returns the errors on the Brick side.
- BrickletAccelerometerV2.set_status_led_config¶
Function ID: - 239
Request: - config – Type: uint8, Range: See meanings, Default: 3
Response: - no response
Sets the status LED configuration. By default the LED shows communication traffic between Brick and Bricklet, it flickers once for every 10 received data packets.
You can also turn the LED permanently on/off or show a heartbeat.
If the Bricklet is in bootloader mode, the LED is will show heartbeat by default.
The following meanings are defined for the elements of this function:
For config:
0 = Off
1 = On
2 = Show Heartbeat
3 = Show Status
- BrickletAccelerometerV2.get_status_led_config¶
Function ID: - 240
Request: - empty payload
Response: - config – Type: uint8, Range: See meanings, Default: 3
Returns the configuration as set by
set_status_led_configThe following meanings are defined for the elements of this function:
For config:
0 = Off
1 = On
2 = Show Heartbeat
3 = Show Status
- BrickletAccelerometerV2.get_chip_temperature¶
Function ID: - 242
Request: - empty payload
Response: - temperature – Type: int16, Unit: 1 °C, Range: [-215 to 215 - 1]
Returns the temperature as measured inside the microcontroller. The value returned is not the ambient temperature!
The temperature is only proportional to the real temperature and it has bad accuracy. Practically it is only useful as an indicator for temperature changes.
- BrickletAccelerometerV2.reset¶
Function ID: - 243
Request: - empty payload
Response: - no response
Calling this function will reset the Bricklet. All configurations will be lost.
After a reset you have to create new device objects, calling functions on the existing ones will result in undefined behavior!
- BrickletAccelerometerV2.get_identity¶
Function ID: - 255
Request: - empty payload
Response: - uid – Type: char[8]
- connected_uid – Type: char[8]
- position – Type: char, Range: ['a' to 'h', 'z']
- hardware_version – Type: uint8[3]
- 0: major – Type: uint8, Range: [0 to 255]
- 1: minor – Type: uint8, Range: [0 to 255]
- 2: revision – Type: uint8, Range: [0 to 255]
- firmware_version – Type: uint8[3]
- 0: major – Type: uint8, Range: [0 to 255]
- 1: minor – Type: uint8, Range: [0 to 255]
- 2: revision – Type: uint8, Range: [0 to 255]
- device_identifier – Type: uint16, Range: [0 to 216 - 1]
Returns the UID, the UID where the Bricklet is connected to, the position, the hardware and firmware version as well as the device identifier.
The position can be 'a', 'b', 'c', 'd', 'e', 'f', 'g' or 'h' (Bricklet Port). A Bricklet connected to an Isolator Bricklet is always at position 'z'.
The device identifier numbers can be found here.
Callback Configuration Functions¶
- BrickletAccelerometerV2.set_acceleration_callback_configuration¶
Function ID: - 4
Request: - period – Type: uint32, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- value_has_to_change – Type: bool, Default: false
Response: - no response
The period is the period with which the
CALLBACK_ACCELERATIONcallback is triggered periodically. A value of 0 turns the callback off.If the value has to change-parameter is set to true, the callback is only triggered after the value has changed. If the value didn't change within the period, the callback is triggered immediately on change.
If it is set to false, the callback is continuously triggered with the period, independent of the value.
If this callback is enabled, the
CALLBACK_CONTINUOUS_ACCELERATION_16_BITcallback andCALLBACK_CONTINUOUS_ACCELERATION_8_BITcallback will automatically be disabled.
- BrickletAccelerometerV2.get_acceleration_callback_configuration¶
Function ID: - 5
Request: - empty payload
Response: - period – Type: uint32, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
- value_has_to_change – Type: bool, Default: false
Returns the callback configuration as set by
set_acceleration_callback_configuration.
- BrickletAccelerometerV2.set_continuous_acceleration_configuration¶
Function ID: - 9
Request: - enable_x – Type: bool, Default: false
- enable_y – Type: bool, Default: false
- enable_z – Type: bool, Default: false
- resolution – Type: uint8, Range: See meanings, Default: 0
Response: - no response
For high throughput of acceleration data (> 1000Hz) you have to use the
CALLBACK_CONTINUOUS_ACCELERATION_16_BITorCALLBACK_CONTINUOUS_ACCELERATION_8_BITcallbacks.You can enable the callback for each axis (x, y, z) individually and choose a resolution of 8 bit or 16 bit.
If at least one of the axis is enabled and the resolution is set to 8 bit, the
CALLBACK_CONTINUOUS_ACCELERATION_8_BITcallback is activated. If at least one of the axis is enabled and the resolution is set to 16 bit, theCALLBACK_CONTINUOUS_ACCELERATION_16_BITcallback is activated.The returned values are raw ADC data. If you want to put this data into a FFT to determine the occurrences of specific frequencies we recommend that you use the data as is. It has all of the ADC noise in it. This noise looks like pure noise at first glance, but it might still have some frequnecy information in it that can be utilized by the FFT.
Otherwise you have to use the following formulas that depend on the configured resolution (8/16 bit) and the full scale range (see
set_configuration) to calculate the data in gₙ/10000 (same unit that is returned byget_acceleration):16 bit, full scale 2g: acceleration = value * 625 / 1024
16 bit, full scale 4g: acceleration = value * 1250 / 1024
16 bit, full scale 8g: acceleration = value * 2500 / 1024
If a resolution of 8 bit is used, only the 8 most significant bits will be transferred, so you can use the following formulas:
8 bit, full scale 2g: acceleration = value * 256 * 625 / 1024
8 bit, full scale 4g: acceleration = value * 256 * 1250 / 1024
8 bit, full scale 8g: acceleration = value * 256 * 2500 / 1024
If no axis is enabled, both callbacks are disabled. If one of the continuous callbacks is enabled, the
CALLBACK_ACCELERATIONcallback is disabled.The maximum throughput depends on the exact configuration:
Number of axis enabled
Throughput 8 bit
Throughout 16 bit
1
25600Hz
25600Hz
2
25600Hz
15000Hz
3
20000Hz
10000Hz
The following meanings are defined for the elements of this function:
For resolution:
0 = 8bit
1 = 16bit
- BrickletAccelerometerV2.get_continuous_acceleration_configuration¶
Function ID: - 10
Request: - empty payload
Response: - enable_x – Type: bool, Default: false
- enable_y – Type: bool, Default: false
- enable_z – Type: bool, Default: false
- resolution – Type: uint8, Range: See meanings, Default: 0
Returns the continuous acceleration configuration as set by
set_continuous_acceleration_configuration.The following meanings are defined for the elements of this function:
For resolution:
0 = 8bit
1 = 16bit
Callbacks¶
- BrickletAccelerometerV2.CALLBACK_ACCELERATION¶
Function ID: - 8
Response: - x – Type: int32, Unit: 1/10000 gₙ, Range: ?
- y – Type: int32, Unit: 1/10000 gₙ, Range: ?
- z – Type: int32, Unit: 1/10000 gₙ, Range: ?
This callback is triggered periodically according to the configuration set by
set_acceleration_callback_configuration.The response values are the same as
get_acceleration.
- BrickletAccelerometerV2.CALLBACK_CONTINUOUS_ACCELERATION_16_BIT¶
Function ID: - 11
Response: - acceleration – Type: int16[30], Unit: ? gₙ, Range: ?
Returns 30 acceleration values with 16 bit resolution. The data rate can be configured with
set_configurationand this callback can be enabled withset_continuous_acceleration_configuration.The returned values are raw ADC data. If you want to put this data into a FFT to determine the occurrences of specific frequencies we recommend that you use the data as is. It has all of the ADC noise in it. This noise looks like pure noise at first glance, but it might still have some frequnecy information in it that can be utilized by the FFT.
Otherwise you have to use the following formulas that depend on the full scale range (see
set_configuration) to calculate the data in gₙ/10000 (same unit that is returned byget_acceleration):Full scale 2g: acceleration = value * 625 / 1024
Full scale 4g: acceleration = value * 1250 / 1024
Full scale 8g: acceleration = value * 2500 / 1024
The data is formated in the sequence "x, y, z, x, y, z, ..." depending on the enabled axis. Examples:
x, y, z enabled: "x, y, z, ..." 10x repeated
x, z enabled: "x, z, ..." 15x repeated
y enabled: "y, ..." 30x repeated
- BrickletAccelerometerV2.CALLBACK_CONTINUOUS_ACCELERATION_8_BIT¶
Function ID: - 12
Response: - acceleration – Type: int8[60], Unit: ? gₙ, Range: ?
Returns 60 acceleration values with 8 bit resolution. The data rate can be configured with
set_configurationand this callback can be enabled withset_continuous_acceleration_configuration.The returned values are raw ADC data. If you want to put this data into a FFT to determine the occurrences of specific frequencies we recommend that you use the data as is. It has all of the ADC noise in it. This noise looks like pure noise at first glance, but it might still have some frequnecy information in it that can be utilized by the FFT.
Otherwise you have to use the following formulas that depend on the full scale range (see
set_configuration) to calculate the data in gₙ/10000 (same unit that is returned byget_acceleration):Full scale 2g: acceleration = value * 256 * 625 / 1024
Full scale 4g: acceleration = value * 256 * 1250 / 1024
Full scale 8g: acceleration = value * 256 * 2500 / 1024
The data is formated in the sequence "x, y, z, x, y, z, ..." depending on the enabled axis. Examples:
x, y, z enabled: "x, y, z, ..." 20x repeated
x, z enabled: "x, z, ..." 30x repeated
y enabled: "y, ..." 60x repeated
Internal Functions¶
Internal functions are used for maintenance tasks such as flashing a new firmware of changing the UID of a Bricklet. These task should be performed using Brick Viewer instead of using the internal functions directly.
- BrickletAccelerometerV2.set_bootloader_mode¶
Function ID: - 235
Request: - mode – Type: uint8, Range: See meanings
Response: - status – Type: uint8, Range: See meanings
Sets the bootloader mode and returns the status after the requested mode change was instigated.
You can change from bootloader mode to firmware mode and vice versa. A change from bootloader mode to firmware mode will only take place if the entry function, device identifier and CRC are present and correct.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
The following meanings are defined for the elements of this function:
For mode:
0 = Bootloader
1 = Firmware
2 = Bootloader Wait For Reboot
3 = Firmware Wait For Reboot
4 = Firmware Wait For Erase And Reboot
For status:
0 = OK
1 = Invalid Mode
2 = No Change
3 = Entry Function Not Present
4 = Device Identifier Incorrect
5 = CRC Mismatch
- BrickletAccelerometerV2.get_bootloader_mode¶
Function ID: - 236
Request: - empty payload
Response: - mode – Type: uint8, Range: See meanings
Returns the current bootloader mode, see
set_bootloader_mode.The following meanings are defined for the elements of this function:
For mode:
0 = Bootloader
1 = Firmware
2 = Bootloader Wait For Reboot
3 = Firmware Wait For Reboot
4 = Firmware Wait For Erase And Reboot
- BrickletAccelerometerV2.set_write_firmware_pointer¶
Function ID: - 237
Request: - pointer – Type: uint32, Unit: 1 B, Range: [0 to 232 - 1]
Response: - no response
Sets the firmware pointer for
write_firmware. The pointer has to be increased by chunks of size 64. The data is written to flash every 4 chunks (which equals to one page of size 256).This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
- BrickletAccelerometerV2.write_firmware¶
Function ID: - 238
Request: - data – Type: uint8[64], Range: [0 to 255]
Response: - status – Type: uint8, Range: [0 to 255]
Writes 64 Bytes of firmware at the position as written by
set_write_firmware_pointerbefore. The firmware is written to flash every 4 chunks.You can only write firmware in bootloader mode.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
- BrickletAccelerometerV2.write_uid¶
Function ID: - 248
Request: - uid – Type: uint32, Range: [0 to 232 - 1]
Response: - no response
Writes a new UID into flash. If you want to set a new UID you have to decode the Base58 encoded UID string into an integer first.
We recommend that you use Brick Viewer to change the UID.
- BrickletAccelerometerV2.read_uid¶
Function ID: - 249
Request: - empty payload
Response: - uid – Type: uint32, Range: [0 to 232 - 1]
Returns the current UID as an integer. Encode as Base58 to get the usual string version.