Tutorial - First Steps¶
The following tutorial will demonstrate how to use Bricks and Bricklets with the Programming Interface.
In the first part we use the DC Brick to drive a motor. After this we make the velocity of this motor controllable by a rotary potentiometer by attaching a Rotary Poti Bricklet. At the end we show how to stack Bricks together to reduce wiring and communicate over wireless or cable based interfaces.
Use a single Brick¶
We choose the DC Brick as a representative throughout this tutorial. It is however easily possible to transfer the concepts shown to other Bricks. Click here for an overview of all available Bricks.
Phase 1: Testing¶
To test the DC Brick you need to have the Brick Daemon and the Brick Viewer installed (for installation guides click here and here). The Brick Viewer has to be connected to the Brick Daemon, click the "Connect" button in Brick Viewer to ensure this.
The Brick Daemon is a bridge between the Bricks/Bricklets and the programming language specific API bindings. It provides a graphical interface for testing purposes.
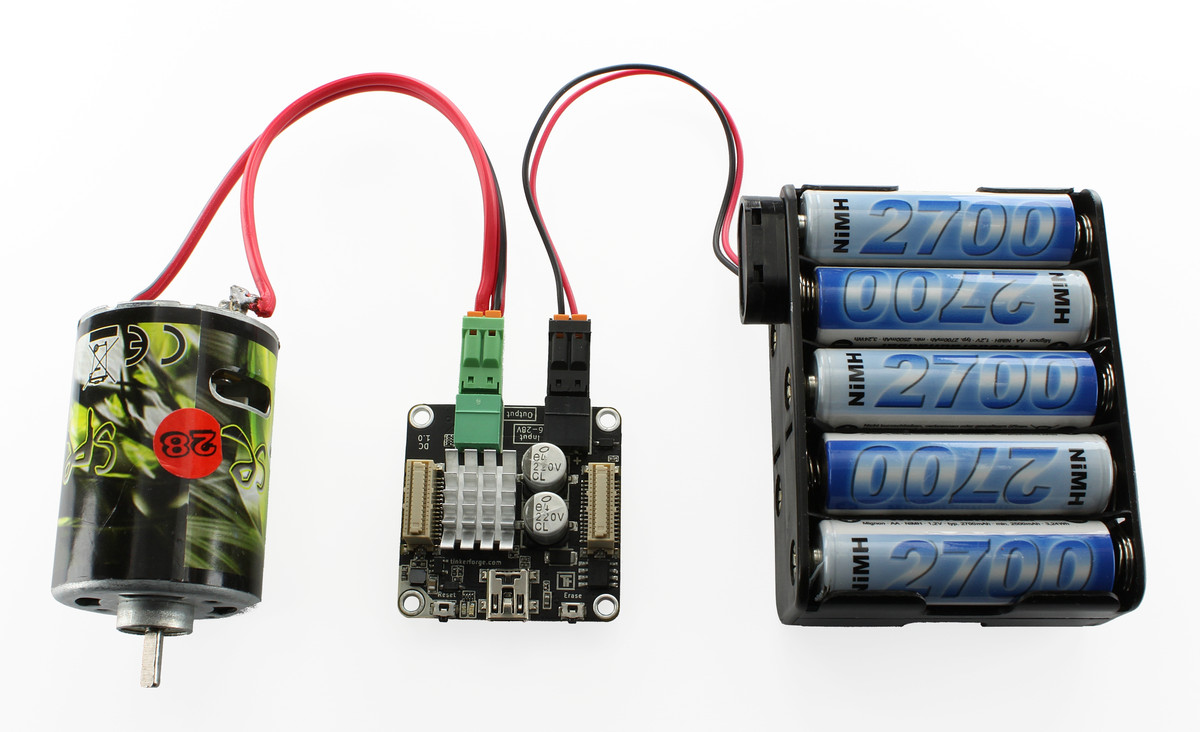
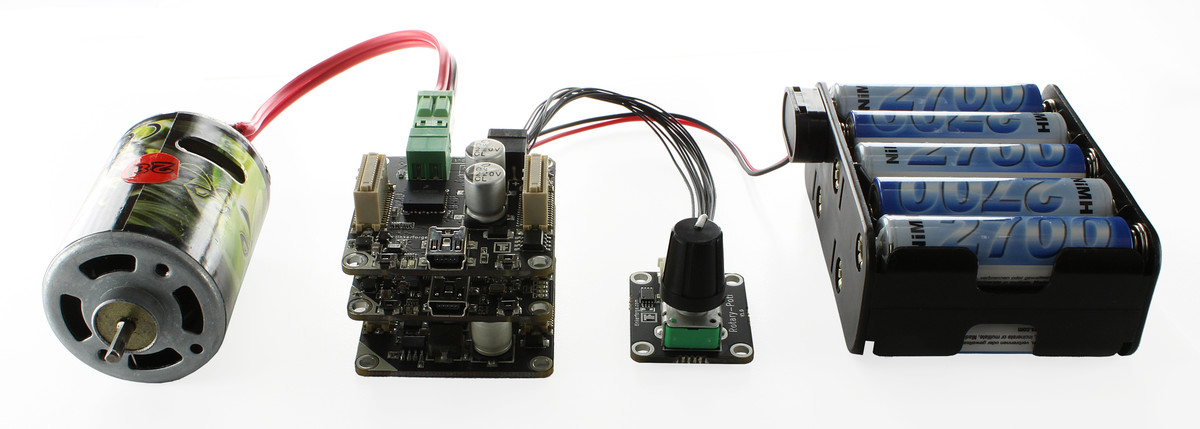
After the installation you are ready to tinker! Take the DC Brick and connect a motor and a battery, as shown the picture below. Of course you can also use a power supply instead of the battery or e.g. a Servo Brick and a servo instead of the DC Brick and a motor:
Now connect the Brick to the PC over USB, you should see a new tab named "DC Brick" in the Brick Viewer after a moment. Select this tab. Your Brick Viewer should now show the interface depicted below:
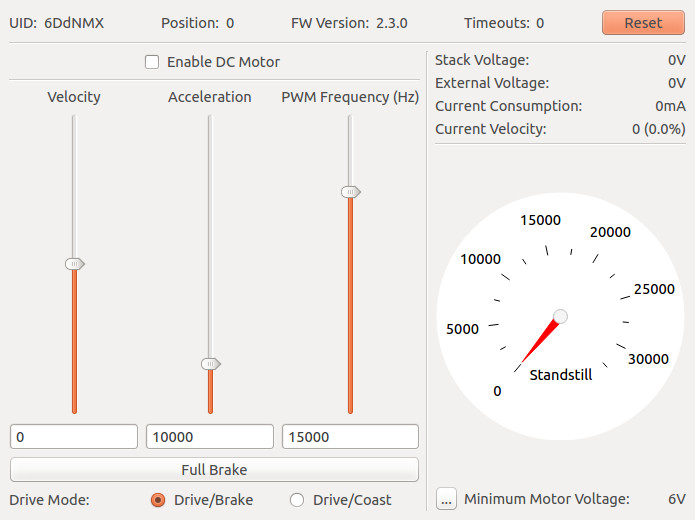
You can see the voltage of the connected battery as "External Voltage" and the current used by the motor as "Current Consumption" as well as a representation of the current velocity on the right side. Different sliders allow you to modify velocity and acceleration of the motor as well as the PWM frequency of the driver. After clicking "Enable DC Motor" you are in control of the motor.
Phase 2: Write your own Program¶
The DC Brick and motor are verified to work properly, there is now nothing in the way to write a first program that controls the DC Brick.
You can choose one of the available programming languages, in this tutorial we use Python.
The necessary steps to get everything working are essentially the same in all programming language. This tutorial together with the examples in the API documentation of every product should allow you to get any Brick working with any programming language.
In the following we assume that you now the basics of the programming language you picked and that the necessary compilers/interpreters are already installed.
First, install the API bindings for your programming languages. Installation instructions for all API bindings can be found here.
Now create a folder for your DC Brick test project. Download one of the examples for the DC Brick from here as a starting point and place it in the folder.
In this tutorial we take a look at example_configuration.py:
1#!/usr/bin/env python
2# -*- coding: utf-8 -*-
3
4HOST = "localhost"
5PORT = 4223
6UID = "XXYYZZ" # Change XXYYZZ to the UID of your DC Brick
7
8import time
9
10from tinkerforge.ip_connection import IPConnection
11from tinkerforge.brick_dc import BrickDC
12
13if __name__ == "__main__":
14 ipcon = IPConnection() # Create IP connection
15 dc = BrickDC(UID, ipcon) # Create device object
16
17 ipcon.connect(HOST, PORT) # Connect to brickd
18 # Don't use device before ipcon is connected
19
20 dc.set_drive_mode(dc.DRIVE_MODE_DRIVE_COAST)
21 dc.set_pwm_frequency(10000) # Use PWM frequency of 10 kHz
22 dc.set_acceleration(4096) # Slow acceleration (12.5 %/s)
23 dc.set_velocity(32767) # Full speed forward (100 %)
24 dc.enable() # Enable motor power
25
26 input("Press key to exit\n") # Use raw_input() in Python 2
27
28 # Stop motor before disabling motor power
29 dc.set_acceleration(16384) # Fast decceleration (50 %/s) for stopping
30 dc.set_velocity(0) # Request motor stop
31 time.sleep(2) # Wait for motor to actually stop: velocity (100 %) / decceleration (50 %/s) = 2 s
32 dc.disable() # Disable motor power
33
34 ipcon.disconnect()
Line 14 creates an IP Connection object.
Line 15 creates an object that allows us to control the DC Brick.
It is necessary to pass the Unique Identifier (UID) of the Brick
(in this example defined in Line 6) and the ipcon object.
Change the UID corresponding to your device!
Note
The easiest way to get the UID of your device is to use the Brick Viewer. If you connect a device to the PC, the Viewer will display the UID in the "Setup" tab.
In Line 17 the IP Connection is connected. It is possible to run your program on another PC than the one which has the Brick Daemon running (e.g. you can write a program for your smart phone that controls a Brick connected to your PC).
The Lines 20-24 configure the DC Brick and let the motor run forwards at full speed.
Line 26 is used to prevent program termination until you press enter.
Line 29-32 stops the motor before the program ends.
Run this Python script and use it or other examples as a starting point for your own project.
Note
A full description of the API and further examples can be found in the description page of each product. In case of the DC Brick here.
Add Bricklets to extend features¶
You can add Bricklets to extend the features of Bricks. Click here for an overview of available Bricklets.
To use a Bricklet, connect it to your Brick over the supplied cable while the Brick is not powered.
We use a Rotary Poti Bricklet and the DC Brick from the previous part of this tutorial, but it is easy to transfer the shown concepts to any Bricklet connected to any Brick.
Phase 1: Testing¶
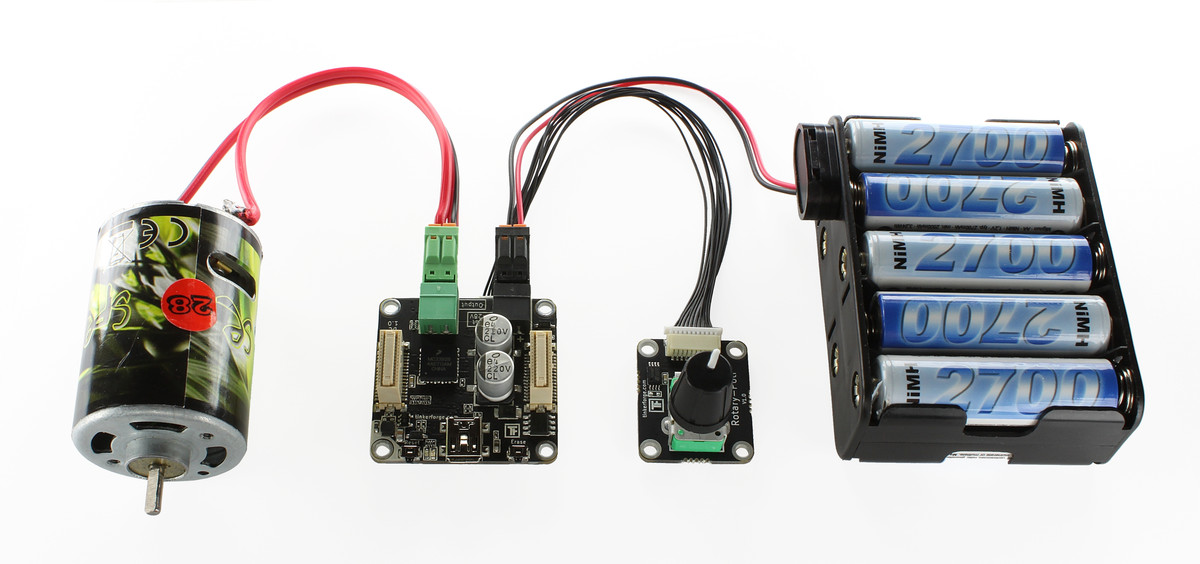
Connect the Rotary Poti Bricklet to your DC Brick as depicted in the image below.
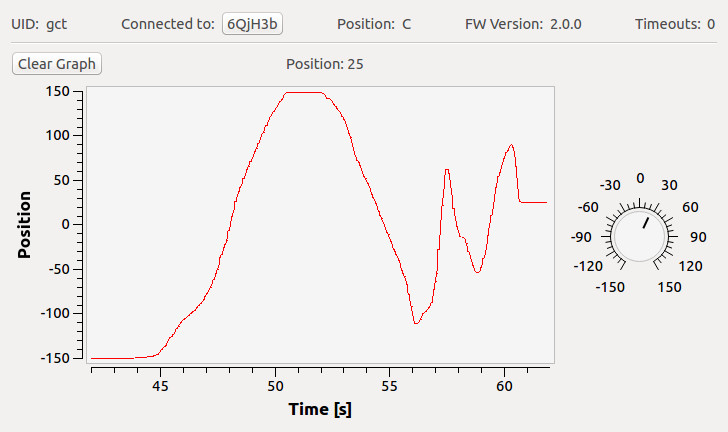
If you now connect the DC Brick to the PC, not only a "DC Brick" tab but also a "Rotary Poti Bricklet" tab will be shown in the Brick Viewer. Select the "Rotary Poti Bricklet" tab and rotate the potentiometer. You should see a corresponding movement in the viewer.
Phase 2: Write your own Program¶
To incorporate the Rotary Poti Bricklet in our small project we change the program to allow controlling the motor velocity with the rotary poti: (Download):
1#!/usr/bin/env python
2# -*- coding: utf-8 -*-
3
4HOST = "localhost"
5PORT = 4223
6UID_DC = "XXYYZZ" # Change to the UID of your DC Brick
7UID_POTI = "XYZ" # Change to the UID of your Rotary Poti Bricklet
8
9from tinkerforge.ip_connection import IPConnection
10from tinkerforge.brick_dc import BrickDC
11from tinkerforge.bricklet_rotary_poti import BrickletRotaryPoti
12
13dc = None
14
15# Callback function for position callback (parameter has range -150 to 150)
16def cb_position(position):
17 velocity = 32767 // 2 * position // 150 # Velocity: -32767/32767
18
19 print('Set Position/Velocity: ' + str(position) + '/' + str(velocity))
20
21 dc.set_velocity(velocity)
22
23if __name__ == "__main__":
24 ipcon = IPConnection() # Create IP connection
25
26 dc = BrickDC(UID_DC, ipcon) # Create DC brick device object
27 poti = BrickletRotaryPoti(UID_POTI, ipcon) # Create rotary poti device object
28
29 ipcon.connect(HOST, PORT) # Connect to brickd
30
31 poti.set_position_callback_period(50) # set callback period to 50ms
32 poti.register_callback(poti.CALLBACK_POSITION, cb_position)
33
34 dc.enable() # Enable motor power
35 dc.set_acceleration(0xFFFF) # Full acceleration
36
37 input('Press Enter to exit\n') # Use raw_input() in Python 2
38
39 # Stop motor before disabling motor power
40 dc.set_acceleration(16384) # Fast decceleration (50 %/s) for stopping
41 dc.set_velocity(0) # Request motor stop
42 time.sleep(2) # Wait for motor to actually stop: velocity (100 %) / decceleration (50 %/s) = 2 s
43 dc.disable() # Disable motor power
44
45 ipcon.disconnect()
Lines 4-7 are the typical configurations, the UID has to be changed according to the Bricks and Bricklets you use.
In Lines 24-29 an IP Connection to the Brick Daemon is established and the Brick and Bricklet device objects are created.
We configure the Rotary Poti Bricklet, to call the function
cb_position every time the position of the potentiometer changes.
Line 31 configures this callback to be triggered with a period of
50ms if the position changes. If the position is unchanged there won't
be any callbacks. This is an efficient implementation, only the bare minimum
of USB bandwidth is used. The callback function is registered in Line 32.
cb_position is defined in Lines 16-21, it sets a new velocity based on
the current position of the potentiometer.
In Lines 34-35 we enable the motor and set a maximum acceleration. This allows the motor to follow the potentiometer movements immediately.
In Lines 37 we wait for user input to prevent program termination.
Line 40-43 stops the motor before the program ends.
Build Stacks¶
To reduce wiring and save space it is possible to stack Bricks. The first (e.g. lowest) Brick in a Stack has to be a Master Brick This brick uses it's USB connection to route the data between the PC and the Bricks in the stack.
The stacking is transparent, which means no code change is necessary between a version, that uses Bricks separately connected over USB to a PC, or a version with an additional Master and stacked Bricks.
It is possible to use more than one Master Brick in a stack, but only the Master Brick at the bottom of the stack acts as the master of the stack. The other Master Bricks can however be used to connect more Bricklets.
The Master of a stack powers each device in the stack over its USB connection with a maximum of 500mA. The motor power of each motor driver Brick in the stack can to be supplied by its own black on-board power-connector. To reduce wiring once more and save space it is possible to use a Power Supply, which is attached at the bottom of the stack (below the lowest Master Brick). These boards power the stacks 5V pins and internal power pins. That means, that the motor power for each motor driver Brick which is not supplied by its on-board power-connector is supplied through the stack by the Power Supplies supply voltage directly. If the Power Supply is supplied with 20V then this 20V is also available as the motor power for each motor driver Brick in the stack.
Additionally the Power Supply creates a 5V line to power the devices of the stack. No power is drawn from the PC if a Power Supply is used. This is especially useful, if a small embedded device is utilized to control the Bricks and Bricklets, since it might not be able to deliver the needed power.
The master of the stack can measure the voltage and the current flow of the connected power supply.
Note
Each driver Brick switches automatically to the stack internal power line if no external supply is attached over the on-board power-connector. Keep this in mind!
In the following part we extend the previous setup by attaching a Master Brick and a Step-Down Power Supply below the DC Brick with the connected Rotary Poti Bricklet.
Note
The white corners show how to plug the Bricks together.
Phase 1: Testing¶
Build a stack consisting of a Step-Down Power Supply with connected battery, a Master Brick with connected Rotary Poti Bricklet and a DC Brick with connected motor (from bottom to top).
This setup is depicted in the image below.
If you connect the Master Brick to the PC over USB, the Brick Viewer should show the Master Brick (measuring current and voltage flowing through the stack), the DC Brick and the Rotary Poti Bricklet.
Phase 2: Write your own Program¶
Since the stacking is transparent you are able to run the program of the previous part without any changes!
Crosslink Stacks¶
The stacks as shown so far in the tutorial are not super exciting, they only reduce wiring and save space. But, as you might have already guessed, there is more to it. It is possible to attach Master Extensions to the stack, which extend the stack with interfaces other than USB, e.g. RS485, Wi-Fi or Ethernet.
To create a RS485 bus between two stacks, you need one Master Brick and two RS485 Master Extensions additionally to the setup used in the previous part. Attach one RS485 Extension on top of your stack and build a new stack from the other RS485 Extension and the Master Brick. Wire up the two Extensions. Finally, connect the Rotary Poti Bricklet to this new stack.
Now connect each stack separately to your PC and configure them with the Brick Viewer as described in the RS485 documentation. It is necessary that you power up the slave stack prior to the master stack.
You should now see two Master Bricks, the Rotary Poti Bricklet and the DC Brick in the Brick Viewer. If this is the case you can run your previously written code without any change.