- Einstieg
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ für Mikrocontroller
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Quelltexte und Bug Tracking
- Programmierschnittstelle
- Kits
- Embedded Boards
- Spezifikationen
LabVIEW - IMU Brick 2.0¶
Dies ist die Beschreibung der LabVIEW API Bindings für den IMU Brick 2.0. Allgemeine Informationen über die Funktionen und technischen Spezifikationen des IMU Brick 2.0 sind in dessen Hardware Beschreibung zusammengefasst.
Eine Installationanleitung für die LabVIEW API Bindings ist Teil deren allgemeine Beschreibung.
Beispiele¶
Der folgende Beispielcode ist Public Domain (CC0 1.0).
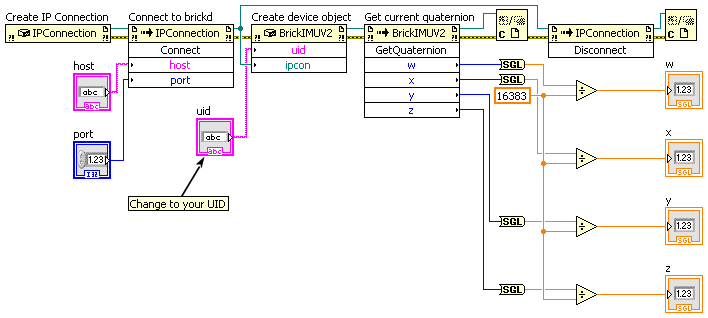
Simple¶
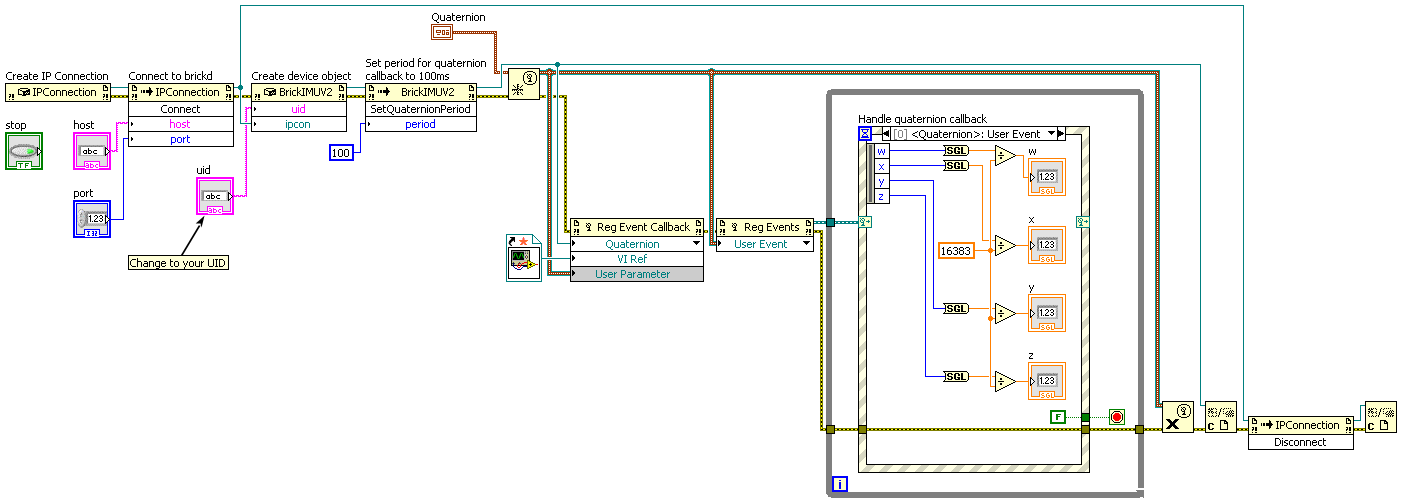
Callback¶
Download (Example Callback.vi), Download (Example Callback - Quaternion Callback.vi)
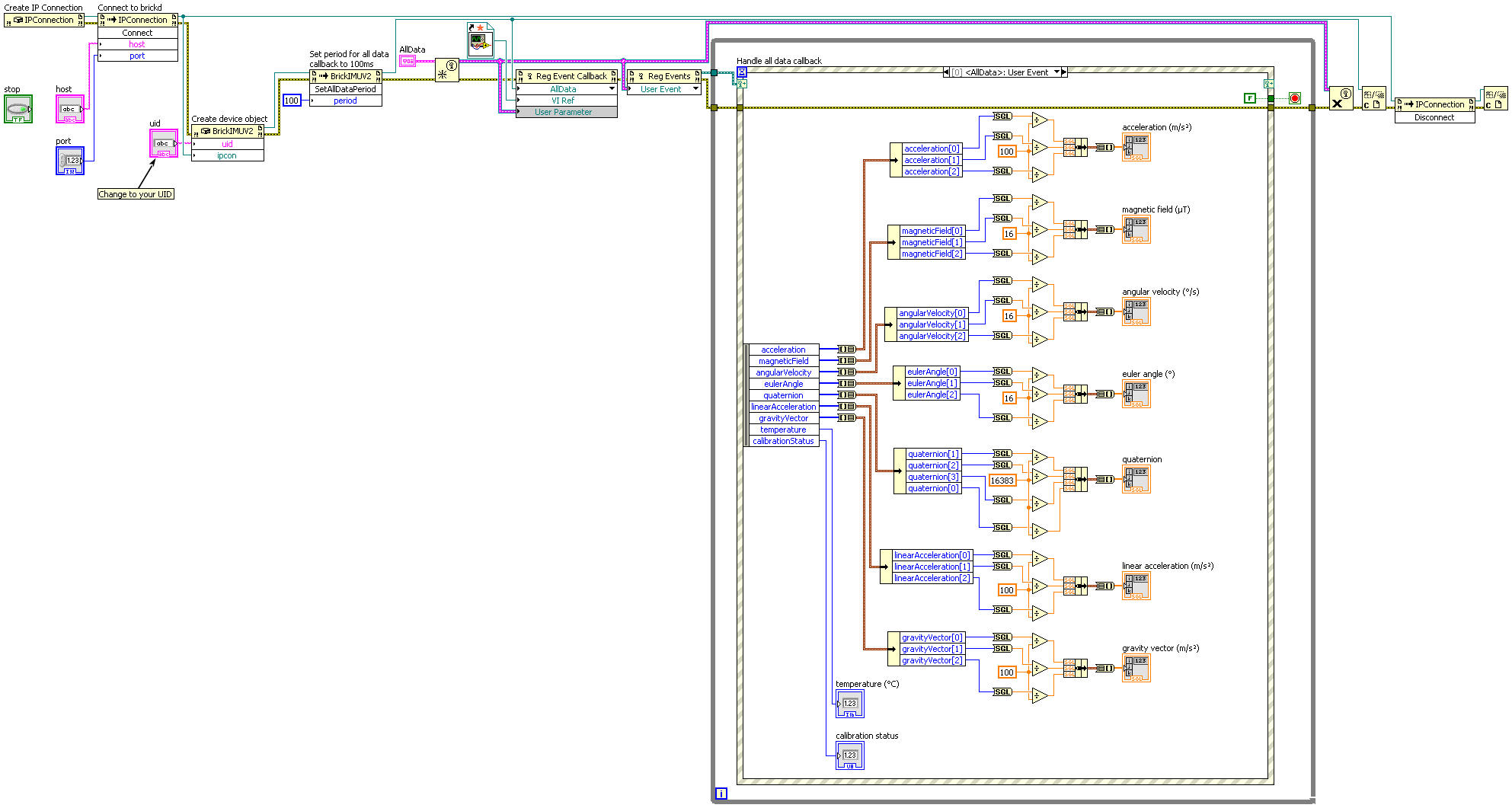
All Data¶
Download (Example All Data.vi), Download (Example All Data - AllData Callback.vi)
API¶
Prinzipiell kann jede Funktion der LabVIEW Bindings, welche einen Wert ausgibt
eine Tinkerforge.TimeoutException melden. Dieser Fehler wird
gemeldet wenn das Gerät nicht antwortet. Wenn eine Kabelverbindung genutzt
wird, ist es unwahrscheinlich, dass die Exception geworfen wird (unter der
Annahme, dass das Gerät nicht abgesteckt wird). Bei einer drahtlosen Verbindung
können Zeitüberschreitungen auftreten, sobald die Entfernung zum Gerät zu
groß wird.
Der Namensraum für alle Brick/Bricklet Bindings und die IPConnection ist
Tinkerforge.*.
Grundfunktionen¶
- BrickIMUV2(uid, ipcon) imuV2¶
Eingabe: - uid – Typ: String
- ipcon – Typ: .NET Refnum (IPConnection)
Ausgabe: - imuV2 – Typ: .NET Refnum (BrickIMUV2)
Erzeugt ein Objekt mit der eindeutigen Geräte ID
uid. Dieses Objekt kann benutzt werden, nachdem die IP Connection verbunden ist.
- BrickIMUV2.GetOrientation() heading, roll, pitch¶
Ausgabe: - heading – Typ: Int16, Einheit: 1/16 °, Wertebereich: [0 bis 5760]
- roll – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-1440 bis 1440]
- pitch – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-2880 bis 2880]
Gibt die aktuelle Orientierung (Gier-, Roll-, Nickwinkel) des IMU Brick in unabhängigen Eulerwinkeln zurück. Zu beachten ist, dass Eulerwinkel immer eine kardanische Blockade erfahren. Wir empfehlen daher stattdessen Quaternionen zu verwenden, wenn die absolute Lage im Raum bestimmt werden soll.
Wenn die Orientierung periodisch abgefragt werden sollen, wird empfohlen den
OrientationCallbackCallback zu nutzen und die Periode mitSetOrientationPeriod()vorzugeben.
- BrickIMUV2.GetLinearAcceleration() x, y, z¶
Ausgabe: - x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
Gibt die lineare Beschleunigungen des IMU Brick für die X-, Y- und Z-Achse zurück. Die Beschleunigungen liegen im Wertebereich, der mit
SetSensorConfiguration()konfiguriert wurde.Die lineare Beschleunigung ist die Beschleunigung in jede der drei Achsen. Der Einfluss von Erdbeschleunigung ist entfernt.
Es ist auch möglich einen Vektor der Erdbeschleunigung zu bekommen, siehe
GetGravityVector()Wenn die Beschleunigungen periodisch abgefragt werden soll, wird empfohlen den
LinearAccelerationCallbackCallback zu nutzen und die Periode mitSetLinearAccelerationPeriod()vorzugeben.
- BrickIMUV2.GetGravityVector() x, y, z¶
Ausgabe: - x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
Gibt den Vektor der Erdbeschleunigung des IMU Brick für die X-, Y- und Z-Achse zurück.
Die Erdbeschleunigung ist die Beschleunigung die auf Grund von Schwerkraft entsteht. Einflüsse von linearen Beschleunigungen sind entfernt.
Es ist auch möglich die lineare Beschleunigung zu bekommen, siehe
GetLinearAcceleration()Wenn die Erdbeschleunigungen periodisch abgefragt werden soll, wird empfohlen den
GravityVectorCallbackCallback zu nutzen und die Periode mitSetGravityVectorPeriod()vorzugeben.
- BrickIMUV2.GetQuaternion() w, x, y, z¶
Ausgabe: - w – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- x – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- y – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- z – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
Gibt die aktuelle Orientierung (w, x, y, z) des IMU Brick als Quaterinonen zurück.
Die Rückgabewerte müssen mit 16383 (14 Bit) dividiert werden, um in den üblichen Wertebereich für Quaternionen (-1,0 bis +1,0) gebracht zu werden.
Wenn die Quaternionen periodisch abgefragt werden sollen, wird empfohlen den
QuaternionCallbackCallback zu nutzen und die Periode mitSetQuaternionPeriod()vorzugeben.
- BrickIMUV2.GetAllData() acceleration, magneticField, angularVelocity, eulerAngle, quaternion, linearAcceleration, gravityVector, temperature, calibrationStatus¶
Ausgabe: - acceleration – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- magneticField – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- 1: y – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- 2: z – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-40000 bis 40000]
- angularVelocity – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- eulerAngle – Typ: Int16[3]
- 0: heading – Typ: Int16, Einheit: 1/16 °, Wertebereich: [0 bis 5760]
- 1: roll – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-1440 bis 1440]
- 2: pitch – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-2880 bis 2880]
- quaternion – Typ: Int16[4]
- 0: w – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 1: x – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 2: y – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 3: z – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- linearAcceleration – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- gravityVector – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- temperature – Typ: Int16, Einheit: 1 °C, Wertebereich: [-128 bis 127]
- calibrationStatus – Typ: Byte, Wertebereich: [0 bis 255]
Gibt alle Daten zurück die dem IMU Brick zur Verfügung stehen.
Beschleunigung (see
GetAcceleration())Magnetfeld (see
GetMagneticField())Winkelgeschwindigkeit (see
GetAngularVelocity())Eulerwinkel (see
GetOrientation())Quaternion (see
GetQuaternion())Lineare Beschleunigung (see
GetLinearAcceleration())Erdbeschleunigungsvektor (see
GetGravityVector())Temperatur (see
GetTemperature())Kalibrierungsstatus (siehe unten)
Der Kalibrierungsstatus besteht aus vier Paaren von je zwei Bits. Jedes Paar von Bits repräsentiert den Status der aktuellen Kalibrierung.
Bit 0-1: Magnetometer
Bit 2-3: Beschleunigungsmesser
Bit 4-5: Gyroskop
Bit 6-7: System
Ein Wert von 0 bedeutet "nicht kalibriert" und ein Wert von 3 bedeutet "vollständig kalibriert". Normalerweise kann der Kalibrierungsstatus vollständig ignoriert werden. Er wird vom Brick Viewer im Kalibrierungsfenster benutzt und nur für die initiale Kalibrierung benötigt. Mehr Information zur Kalibrierung des IMU Bricks gibt es im Kalibrierungsfenster.
Wenn die Daten periodisch abgefragt werden sollen, wird empfohlen den
AllDataCallbackCallback zu nutzen und die Periode mitSetAllDataPeriod()vorzugeben.
- BrickIMUV2.LedsOn()¶
Aktiviert die Orientierungs- und Richtungs-LEDs des IMU Brick.
- BrickIMUV2.LedsOff()¶
Deaktiviert die Orientierungs- und Richtungs-LEDs des IMU Brick.
- BrickIMUV2.AreLedsOn() leds¶
Ausgabe: - leds – Typ: Boolean, Standardwert: T
Gibt zurück ob die Orientierungs- und Richtungs-LEDs des IMU Brick aktiv sind.
Fortgeschrittene Funktionen¶
- BrickIMUV2.GetAcceleration() x, y, z¶
Ausgabe: - x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
Gibt die kalibrierten Beschleunigungen des Beschleunigungsmessers für die X-, Y- und Z-Achse zurück. Die Beschleunigungen liegen im Wertebereich, der mit
SetSensorConfiguration()konfiguriert wurde.Wenn die Beschleunigungen periodisch abgefragt werden soll, wird empfohlen den
AccelerationCallbackCallback zu nutzen und die Periode mitSetAccelerationPeriod()vorzugeben.
- BrickIMUV2.GetMagneticField() x, y, z¶
Ausgabe: - x – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- y – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- z – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-40000 bis 40000]
Gibt das kalibrierte Magnetfeld des Magnetometers für die X-, Y- und Z-Komponenten zurück.
Wenn das Magnetfeld periodisch abgefragt werden soll, wird empfohlen den
MagneticFieldCallbackCallback zu nutzen und die Periode mitSetMagneticFieldPeriod()vorzugeben.
- BrickIMUV2.GetAngularVelocity() x, y, z¶
Ausgabe: - x – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- y – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- z – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
Gibt die kalibrierte Winkelgeschwindigkeiten des Gyroskops für die X-, Y- und Z-Achse zurück. Die Winkelgeschwindigkeiten liegen im Wertebereich, der mit
SetSensorConfiguration()konfiguriert wurde.Wenn die Winkelgeschwindigkeiten periodisch abgefragt werden sollen, wird empfohlen den
AngularVelocityCallbackCallback zu nutzen und die Periode mitSetAngularVelocityPeriod()vorzugeben.
- BrickIMUV2.GetTemperature() temperature¶
Ausgabe: - temperature – Typ: Int16, Einheit: 1 °C, Wertebereich: [-128 bis 127]
Gibt die Temperatur des IMU Brick zurück. Die Temperatur wird im Kern des BNO055 ICs gemessen, es handelt sich nicht um die Umgebungstemperatur.
- BrickIMUV2.SaveCalibration() calibrationDone¶
Ausgabe: - calibrationDone – Typ: Boolean
Ein Aufruf dieser Funktion speichert die aktuelle Kalibrierung damit sie beim nächsten Neustart des IMU Brick als Startpunkt für die kontinuierliche Kalibrierung genutzt werden kann.
Ein Rückgabewert von true bedeutet das die Kalibrierung genutzt werden konnte und false bedeutet das die Kalibrierung nicht genutzt werden konnte (dies passiert wenn der Kalibrierungsstatus nicht "fully calibrated" ist).
Diese Funktion wird vom Kalibrierungsfenster des Brick Viewer benutzt. Sie sollte in einem normalen Benutzerprogramm nicht aufgerufen werden müssen.
- BrickIMUV2.SetSensorConfiguration(magnetometerRate, gyroscopeRange, gyroscopeBandwidth, accelerometerRange, accelerometerBandwidth)¶
Eingabe: - magnetometerRate – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 5
- gyroscopeRange – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 0
- gyroscopeBandwidth – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 7
- accelerometerRange – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
- accelerometerBandwidth – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 3
Setzt die verfügbaren Sensor-Konfigurationen für Magnetometer, Gyroskop und Beschleunigungssensor. Der Beschleunigungssensor-Wertebereich ist in allen Fusion-Modi wählbar, während alle anderen Konfigurationen im Fusion-Modus automatisch kontrolliert werden.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für magnetometerRate:
BrickIMUV2.MAGNETOMETER_RATE_2HZ = 0
BrickIMUV2.MAGNETOMETER_RATE_6HZ = 1
BrickIMUV2.MAGNETOMETER_RATE_8HZ = 2
BrickIMUV2.MAGNETOMETER_RATE_10HZ = 3
BrickIMUV2.MAGNETOMETER_RATE_15HZ = 4
BrickIMUV2.MAGNETOMETER_RATE_20HZ = 5
BrickIMUV2.MAGNETOMETER_RATE_25HZ = 6
BrickIMUV2.MAGNETOMETER_RATE_30HZ = 7
Für gyroscopeRange:
BrickIMUV2.GYROSCOPE_RANGE_2000DPS = 0
BrickIMUV2.GYROSCOPE_RANGE_1000DPS = 1
BrickIMUV2.GYROSCOPE_RANGE_500DPS = 2
BrickIMUV2.GYROSCOPE_RANGE_250DPS = 3
BrickIMUV2.GYROSCOPE_RANGE_125DPS = 4
Für gyroscopeBandwidth:
BrickIMUV2.GYROSCOPE_BANDWIDTH_523HZ = 0
BrickIMUV2.GYROSCOPE_BANDWIDTH_230HZ = 1
BrickIMUV2.GYROSCOPE_BANDWIDTH_116HZ = 2
BrickIMUV2.GYROSCOPE_BANDWIDTH_47HZ = 3
BrickIMUV2.GYROSCOPE_BANDWIDTH_23HZ = 4
BrickIMUV2.GYROSCOPE_BANDWIDTH_12HZ = 5
BrickIMUV2.GYROSCOPE_BANDWIDTH_64HZ = 6
BrickIMUV2.GYROSCOPE_BANDWIDTH_32HZ = 7
Für accelerometerRange:
BrickIMUV2.ACCELEROMETER_RANGE_2G = 0
BrickIMUV2.ACCELEROMETER_RANGE_4G = 1
BrickIMUV2.ACCELEROMETER_RANGE_8G = 2
BrickIMUV2.ACCELEROMETER_RANGE_16G = 3
Für accelerometerBandwidth:
BrickIMUV2.ACCELEROMETER_BANDWIDTH_7_81HZ = 0
BrickIMUV2.ACCELEROMETER_BANDWIDTH_15_63HZ = 1
BrickIMUV2.ACCELEROMETER_BANDWIDTH_31_25HZ = 2
BrickIMUV2.ACCELEROMETER_BANDWIDTH_62_5HZ = 3
BrickIMUV2.ACCELEROMETER_BANDWIDTH_125HZ = 4
BrickIMUV2.ACCELEROMETER_BANDWIDTH_250HZ = 5
BrickIMUV2.ACCELEROMETER_BANDWIDTH_500HZ = 6
BrickIMUV2.ACCELEROMETER_BANDWIDTH_1000HZ = 7
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.GetSensorConfiguration() magnetometerRate, gyroscopeRange, gyroscopeBandwidth, accelerometerRange, accelerometerBandwidth¶
Ausgabe: - magnetometerRate – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 5
- gyroscopeRange – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 0
- gyroscopeBandwidth – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 7
- accelerometerRange – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
- accelerometerBandwidth – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 3
Gibt die Sensor-Konfiguration zurück, wie von
SetSensorConfiguration()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für magnetometerRate:
BrickIMUV2.MAGNETOMETER_RATE_2HZ = 0
BrickIMUV2.MAGNETOMETER_RATE_6HZ = 1
BrickIMUV2.MAGNETOMETER_RATE_8HZ = 2
BrickIMUV2.MAGNETOMETER_RATE_10HZ = 3
BrickIMUV2.MAGNETOMETER_RATE_15HZ = 4
BrickIMUV2.MAGNETOMETER_RATE_20HZ = 5
BrickIMUV2.MAGNETOMETER_RATE_25HZ = 6
BrickIMUV2.MAGNETOMETER_RATE_30HZ = 7
Für gyroscopeRange:
BrickIMUV2.GYROSCOPE_RANGE_2000DPS = 0
BrickIMUV2.GYROSCOPE_RANGE_1000DPS = 1
BrickIMUV2.GYROSCOPE_RANGE_500DPS = 2
BrickIMUV2.GYROSCOPE_RANGE_250DPS = 3
BrickIMUV2.GYROSCOPE_RANGE_125DPS = 4
Für gyroscopeBandwidth:
BrickIMUV2.GYROSCOPE_BANDWIDTH_523HZ = 0
BrickIMUV2.GYROSCOPE_BANDWIDTH_230HZ = 1
BrickIMUV2.GYROSCOPE_BANDWIDTH_116HZ = 2
BrickIMUV2.GYROSCOPE_BANDWIDTH_47HZ = 3
BrickIMUV2.GYROSCOPE_BANDWIDTH_23HZ = 4
BrickIMUV2.GYROSCOPE_BANDWIDTH_12HZ = 5
BrickIMUV2.GYROSCOPE_BANDWIDTH_64HZ = 6
BrickIMUV2.GYROSCOPE_BANDWIDTH_32HZ = 7
Für accelerometerRange:
BrickIMUV2.ACCELEROMETER_RANGE_2G = 0
BrickIMUV2.ACCELEROMETER_RANGE_4G = 1
BrickIMUV2.ACCELEROMETER_RANGE_8G = 2
BrickIMUV2.ACCELEROMETER_RANGE_16G = 3
Für accelerometerBandwidth:
BrickIMUV2.ACCELEROMETER_BANDWIDTH_7_81HZ = 0
BrickIMUV2.ACCELEROMETER_BANDWIDTH_15_63HZ = 1
BrickIMUV2.ACCELEROMETER_BANDWIDTH_31_25HZ = 2
BrickIMUV2.ACCELEROMETER_BANDWIDTH_62_5HZ = 3
BrickIMUV2.ACCELEROMETER_BANDWIDTH_125HZ = 4
BrickIMUV2.ACCELEROMETER_BANDWIDTH_250HZ = 5
BrickIMUV2.ACCELEROMETER_BANDWIDTH_500HZ = 6
BrickIMUV2.ACCELEROMETER_BANDWIDTH_1000HZ = 7
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.SetSensorFusionMode(mode)¶
Eingabe: - mode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
Wenn der Fusion-Modus deaktiviert wird, geben die Funktionen
GetAcceleration(),GetMagneticField()undGetAngularVelocity()unkalibrierte und umkompensierte Sensorwerte zurück. Alle anderen Sensordaten-Getter geben keine Daten zurück.Seit Firmware Version 2.0.6 kann auch ein Fusion-Modus ohne Magnetometer ausgewählt werden. In diesem Modus wird die Orientierung relativ berechnet (mit Magnetometer ist sie absolut in Bezug auf die Erde). Allerdings kann die Berechnung in diesem Fall nicht von störenden Magnetfeldern beeinflusst werden.
Seit Firmware Version 2.0.13 kann auch ein Fusion-Modus ohne schnelle Magnetometer-Kalibrierung ausgewählt werden. Dieser Modus ist der gleiche wie der "normale" Fusion-Modus, aber die schnelle Magnetometer-Kalibrierung ist aus. D.h. die Orientierung zu finden mag beim ersten start länger dauern, allerdings mag es sein das kleine magnetische einflüsse die automatische Kalibrierung nicht so stark stören.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickIMUV2.SENSOR_FUSION_OFF = 0
BrickIMUV2.SENSOR_FUSION_ON = 1
BrickIMUV2.SENSOR_FUSION_ON_WITHOUT_MAGNETOMETER = 2
BrickIMUV2.SENSOR_FUSION_ON_WITHOUT_FAST_MAGNETOMETER_CALIBRATION = 3
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.GetSensorFusionMode() mode¶
Ausgabe: - mode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
Gibt den aktuellen Sensor-Fusion-Modus zurück, wie von
SetSensorFusionMode()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickIMUV2.SENSOR_FUSION_OFF = 0
BrickIMUV2.SENSOR_FUSION_ON = 1
BrickIMUV2.SENSOR_FUSION_ON_WITHOUT_MAGNETOMETER = 2
BrickIMUV2.SENSOR_FUSION_ON_WITHOUT_FAST_MAGNETOMETER_CALIBRATION = 3
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.SetSPITFPBaudrateConfig(enableDynamicBaudrate, minimumDynamicBaudrate)¶
Eingabe: - enableDynamicBaudrate – Typ: Boolean, Standardwert: T
- minimumDynamicBaudrate – Typ: Int64, Einheit: 1 Bd, Wertebereich: [400000 bis 2000000], Standardwert: 400000
Das SPITF-Protokoll kann mit einer dynamischen Baudrate genutzt werden. Wenn die dynamische Baudrate aktiviert ist, versucht der Brick die Baudrate anhand des Datenaufkommens zwischen Brick und Bricklet anzupassen.
Die Baudrate wird exponentiell erhöht wenn viele Daten gesendet/empfangen werden und linear verringert wenn wenig Daten gesendet/empfangen werden.
Diese Vorgehensweise verringert die Baudrate in Anwendungen wo nur wenig Daten ausgetauscht werden müssen (z.B. eine Wetterstation) und erhöht die Robustheit. Wenn immer viele Daten ausgetauscht werden (z.B. Thermal Imaging Bricklet), wird die Baudrate automatisch erhöht.
In Fällen wo wenige Daten all paar Sekunden so schnell wie Möglich übertragen werden sollen (z.B. RS485 Bricklet mit hoher Baudrate aber kleinem Payload) kann die dynamische Baudrate zum maximieren der Performance ausgestellt werden.
Die maximale Baudrate kann pro Port mit der Funktion
SetSPITFPBaudrate(). gesetzt werden. Falls die dynamische Baudrate nicht aktiviert ist, wird die Baudrate wie vonSetSPITFPBaudrate()gesetzt statisch verwendet.Neu in Version 2.0.10$nbsp;(Firmware).
- BrickIMUV2.GetSPITFPBaudrateConfig() enableDynamicBaudrate, minimumDynamicBaudrate¶
Ausgabe: - enableDynamicBaudrate – Typ: Boolean, Standardwert: T
- minimumDynamicBaudrate – Typ: Int64, Einheit: 1 Bd, Wertebereich: [400000 bis 2000000], Standardwert: 400000
Gibt die Baudratenkonfiguration zurück, siehe
SetSPITFPBaudrateConfig().Neu in Version 2.0.10$nbsp;(Firmware).
- BrickIMUV2.GetSendTimeoutCount(communicationMethod) timeoutCount¶
Eingabe: - communicationMethod – Typ: Byte, Wertebereich: Siehe Konstanten
Ausgabe: - timeoutCount – Typ: Int64, Wertebereich: [0 bis 232 - 1]
Gibt den Timeout-Zähler für die verschiedenen Kommunikationsmöglichkeiten zurück
Die Kommunikationsmöglichkeiten 0-2 stehen auf allen Bricks zur verfügung, 3-7 nur auf Master Bricks.
Diese Funktion ist hauptsächlich zum debuggen während der Entwicklung gedacht. Im normalen Betrieb sollten alle Zähler fast immer auf 0 stehen bleiben.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für communicationMethod:
BrickIMUV2.COMMUNICATION_METHOD_NONE = 0
BrickIMUV2.COMMUNICATION_METHOD_USB = 1
BrickIMUV2.COMMUNICATION_METHOD_SPI_STACK = 2
BrickIMUV2.COMMUNICATION_METHOD_CHIBI = 3
BrickIMUV2.COMMUNICATION_METHOD_RS485 = 4
BrickIMUV2.COMMUNICATION_METHOD_WIFI = 5
BrickIMUV2.COMMUNICATION_METHOD_ETHERNET = 6
BrickIMUV2.COMMUNICATION_METHOD_WIFI_V2 = 7
Neu in Version 2.0.7$nbsp;(Firmware).
- BrickIMUV2.SetSPITFPBaudrate(brickletPort, baudrate)¶
Eingabe: - brickletPort – Typ: Char, Wertebereich: ["a" bis "b"]
- baudrate – Typ: Int64, Einheit: 1 Bd, Wertebereich: [400000 bis 2000000], Standardwert: 1400000
Setzt die Baudrate eines spezifischen Bricklet Ports .
Für einen höheren Durchsatz der Bricklets kann die Baudrate erhöht werden. Wenn der Fehlerzähler auf Grund von lokaler Störeinstrahlung hoch ist (siehe
GetSPITFPErrorCount()) kann die Baudrate verringert werden.Wenn das Feature der dynamische Baudrate aktiviert ist, setzt diese Funktion die maximale Baudrate (siehe
SetSPITFPBaudrateConfig()).EMV Tests werden mit der Standardbaudrate durchgeführt. Falls eine CE-Kompatibilität o.ä. in der Anwendung notwendig ist empfehlen wir die Baudrate nicht zu ändern.
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.GetSPITFPBaudrate(brickletPort) baudrate¶
Eingabe: - brickletPort – Typ: Char, Wertebereich: ["a" bis "b"]
Ausgabe: - baudrate – Typ: Int64, Einheit: 1 Bd, Wertebereich: [400000 bis 2000000], Standardwert: 1400000
Gibt die Baudrate für einen Bricklet Port zurück, siehe
SetSPITFPBaudrate().Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.GetSPITFPErrorCount(brickletPort) errorCountACKChecksum, errorCountMessageChecksum, errorCountFrame, errorCountOverflow¶
Eingabe: - brickletPort – Typ: Char, Wertebereich: ["a" bis "b"]
Ausgabe: - errorCountACKChecksum – Typ: Int64, Wertebereich: [0 bis 232 - 1]
- errorCountMessageChecksum – Typ: Int64, Wertebereich: [0 bis 232 - 1]
- errorCountFrame – Typ: Int64, Wertebereich: [0 bis 232 - 1]
- errorCountOverflow – Typ: Int64, Wertebereich: [0 bis 232 - 1]
Gibt die Anzahl der Fehler die während der Kommunikation zwischen Brick und Bricklet aufgetreten sind zurück.
Die Fehler sind aufgeteilt in
ACK-Checksummen Fehler,
Message-Checksummen Fehler,
Framing Fehler und
Overflow Fehler.
Die Fehlerzähler sind für Fehler die auf der Seite des Bricks auftreten. Jedes Bricklet hat eine ähnliche Funktion welche die Fehler auf Brickletseite ausgibt.
Neu in Version 2.0.5$nbsp;(Firmware).
- BrickIMUV2.EnableStatusLED()¶
Aktiviert die Status LED.
Die Status LED ist die blaue LED neben dem USB-Stecker. Wenn diese aktiviert ist, ist sie an und sie flackert wenn Daten transferiert werden. Wenn sie deaktiviert ist, ist sie immer aus.
Der Standardzustand ist aktiviert.
- BrickIMUV2.DisableStatusLED()¶
Deaktiviert die Status LED.
Die Status LED ist die blaue LED neben dem USB-Stecker. Wenn diese aktiviert ist, ist sie an und sie flackert wenn Daten transferiert werden. Wenn sie deaktiviert ist, ist sie immer aus.
Der Standardzustand ist aktiviert.
- BrickIMUV2.IsStatusLEDEnabled() enabled¶
Ausgabe: - enabled – Typ: Boolean, Standardwert: T
Gibt true zurück wenn die Status LED aktiviert ist, false sonst.
- BrickIMUV2.GetChipTemperature() temperature¶
Ausgabe: - temperature – Typ: Int16, Einheit: 1/10 °C, Wertebereich: [-215 bis 215 - 1]
Gibt die Temperatur, gemessen im Mikrocontroller, aus. Der Rückgabewert ist nicht die Umgebungstemperatur.
Die Temperatur ist lediglich proportional zur echten Temperatur und hat eine Genauigkeit von ±15%. Daher beschränkt sich der praktische Nutzen auf die Indikation von Temperaturveränderungen.
- BrickIMUV2.Reset()¶
Ein Aufruf dieser Funktion setzt den Brick zurück. Befindet sich der Brick innerhalb eines Stapels wird der gesamte Stapel zurück gesetzt.
Nach dem Zurücksetzen ist es notwendig neue Geräteobjekte zu erzeugen, Funktionsaufrufe auf bestehende führt zu undefiniertem Verhalten.
- BrickIMUV2.GetIdentity() uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶
Ausgabe: - uid – Typ: String, Länge: bis zu 8
- connectedUid – Typ: String, Länge: bis zu 8
- position – Typ: Char, Wertebereich: ["0" bis "8"]
- hardwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- firmwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- deviceIdentifier – Typ: Int32, Wertebereich: [0 bis 216 - 1]
Gibt die UID, die UID zu der der Brick verbunden ist, die Position, die Hard- und Firmware Version sowie den Device Identifier zurück.
Die Position ist die Position im Stack von '0' (unterster Brick) bis '8' (oberster Brick).
Eine Liste der Device Identifier Werte ist hier zu finden. Es gibt auch eine Konstante für den Device Identifier dieses Bricks.
Konfigurationsfunktionen für Callbacks¶
- BrickIMUV2.SetAccelerationPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
AccelerationCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetAccelerationPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetAccelerationPeriod()gesetzt.
- BrickIMUV2.SetMagneticFieldPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
MagneticFieldCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetMagneticFieldPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetMagneticFieldPeriod()gesetzt.
- BrickIMUV2.SetAngularVelocityPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
AngularVelocityCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetAngularVelocityPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetAngularVelocityPeriod()gesetzt.
- BrickIMUV2.SetTemperaturePeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
TemperatureCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetTemperaturePeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetTemperaturePeriod()gesetzt.
- BrickIMUV2.SetOrientationPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
OrientationCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetOrientationPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetOrientationPeriod()gesetzt.
- BrickIMUV2.SetLinearAccelerationPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
LinearAccelerationCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetLinearAccelerationPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetLinearAccelerationPeriod()gesetzt.
- BrickIMUV2.SetGravityVectorPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
GravityVectorCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetGravityVectorPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetGravityVectorPeriod()gesetzt.
- BrickIMUV2.SetQuaternionPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
QuaternionCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetQuaternionPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetQuaternionPeriod()gesetzt.
- BrickIMUV2.SetAllDataPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
AllDataCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.
- BrickIMUV2.GetAllDataPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetAllDataPeriod()gesetzt.
Callbacks¶
Callbacks können registriert werden um zeitkritische oder wiederkehrende Daten vom Gerät zu erhalten. Die Registrierung erfolgt indem eine Funktion einem Callback Property des Geräte Objektes zugewiesen wird. Die verfügbaren Callback Properties und ihre Parametertypen werden weiter unten beschrieben.
Bemerkung
Callbacks für wiederkehrende Ereignisse zu verwenden ist immer zu bevorzugen gegenüber der Verwendung von Abfragen. Es wird weniger USB-Bandbreite benutzt und die Latenz ist erheblich geringer, da es keine Paketumlaufzeit gibt.
- event BrickIMUV2.AccelerationCallback sender, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
Dieser Callback wird mit der Periode, wie gesetzt mit
SetAccelerationPeriod(), ausgelöst. Die Parameter sind die Beschleunigungen der X, Y und Z-Achse.
- event BrickIMUV2.MagneticFieldCallback sender, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- x – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- y – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- z – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-40000 bis 40000]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetMagneticFieldPeriod(), ausgelöst. Die Parameter sind die Magnetfeldkomponenten der X, Y und Z-Achse.
- event BrickIMUV2.AngularVelocityCallback sender, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- x – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- y – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- z – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
Dieser Callback wird mit der Periode, wie gesetzt mit
SetAngularVelocityPeriod(), ausgelöst. Die Parameter sind die Winkelgeschwindigkeiten der X, Y und Z-Achse.
- event BrickIMUV2.TemperatureCallback sender, temperature¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- temperature – Typ: Int16, Einheit: 1 °C, Wertebereich: [-128 bis 127]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetTemperaturePeriod(), ausgelöst. Der Parameter ist die Temperatur.
- event BrickIMUV2.LinearAccelerationCallback sender, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
Dieser Callback wird mit der Periode, wie gesetzt mit
SetLinearAccelerationPeriod(), ausgelöst. Die Parameter sind die linearen Beschleunigungen der X, Y und Z-Achse.
- event BrickIMUV2.GravityVectorCallback sender, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
- z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: [-981 bis 981]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetGravityVectorPeriod(), ausgelöst. Die Parameter sind die Erdbeschleunigungsvektor-Werte der X, Y und Z-Achse.
- event BrickIMUV2.OrientationCallback sender, heading, roll, pitch¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- heading – Typ: Int16, Einheit: 1/16 °, Wertebereich: [0 bis 5760]
- roll – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-1440 bis 1440]
- pitch – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-2880 bis 2880]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetOrientationPeriod(), ausgelöst. Die Parameter sind die Orientierung (Gier-, Roll-, Nickwinkel) des IMU Brick in Eulerwinkeln. SieheGetOrientation()für Details.
- event BrickIMUV2.QuaternionCallback sender, w, x, y, z¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- w – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- x – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- y – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- z – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetQuaternionPeriod(), ausgelöst. Die Parameter sind die Orientierung (w, x, y, z) des IMU Brick in Quaternionen. SieheGetQuaternion()für Details.
- event BrickIMUV2.AllDataCallback sender, acceleration, magneticField, angularVelocity, eulerAngle, quaternion, linearAcceleration, gravityVector, temperature, calibrationStatus¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickIMUV2)
- acceleration – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- magneticField – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- 1: y – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-20800 bis 20800]
- 2: z – Typ: Int16, Einheit: 1/16 µT, Wertebereich: [-40000 bis 40000]
- angularVelocity – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1/16 °/s, Wertebereich: ?
- eulerAngle – Typ: Int16[3]
- 0: heading – Typ: Int16, Einheit: 1/16 °, Wertebereich: [0 bis 5760]
- 1: roll – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-1440 bis 1440]
- 2: pitch – Typ: Int16, Einheit: 1/16 °, Wertebereich: [-2880 bis 2880]
- quaternion – Typ: Int16[4]
- 0: w – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 1: x – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 2: y – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- 3: z – Typ: Int16, Einheit: 1/16383, Wertebereich: [-214 + 1 bis 214 - 1]
- linearAcceleration – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- gravityVector – Typ: Int16[3]
- 0: x – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 1: y – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- 2: z – Typ: Int16, Einheit: 1 cm/s², Wertebereich: ?
- temperature – Typ: Int16, Einheit: 1 °C, Wertebereich: [-128 bis 127]
- calibrationStatus – Typ: Byte, Wertebereich: [0 bis 255]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetAllDataPeriod(), ausgelöst. Die Parameter sind die gleichen wie beiGetAllData().
Virtuelle Funktionen¶
Virtuelle Funktionen kommunizieren nicht mit dem Gerät selbst, sie arbeiten nur auf dem API Bindings Objekt. Dadurch können sie auch aufgerufen werden, ohne das das dazugehörige IP Connection Objekt verbunden ist.
- BrickIMUV2.GetAPIVersion() apiVersion¶
Ausgabe: - apiVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
Gibt die Version der API Definition zurück, die diese API Bindings implementieren. Dies ist weder die Release-Version dieser API Bindings noch gibt es in irgendeiner Weise Auskunft über den oder das repräsentierte(n) Brick oder Bricklet.
- BrickIMUV2.GetResponseExpected(functionId) responseExpected¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
Ausgabe: - responseExpected – Typ: Boolean
Gibt das Response-Expected-Flag für die Funktion mit der angegebenen Funktions IDs zurück. Es ist true falls für die Funktion beim Aufruf eine Antwort erwartet wird, false andernfalls.
Für Getter-Funktionen ist diese Flag immer gesetzt und kann nicht entfernt werden, da diese Funktionen immer eine Antwort senden. Für Konfigurationsfunktionen für Callbacks ist es standardmäßig gesetzt, kann aber entfernt werden mittels
SetResponseExpected(). Für Setter-Funktionen ist es standardmäßig nicht gesetzt, kann aber gesetzt werden.Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickIMUV2.FUNCTION_LEDS_ON = 10
BrickIMUV2.FUNCTION_LEDS_OFF = 11
BrickIMUV2.FUNCTION_SET_ACCELERATION_PERIOD = 14
BrickIMUV2.FUNCTION_SET_MAGNETIC_FIELD_PERIOD = 16
BrickIMUV2.FUNCTION_SET_ANGULAR_VELOCITY_PERIOD = 18
BrickIMUV2.FUNCTION_SET_TEMPERATURE_PERIOD = 20
BrickIMUV2.FUNCTION_SET_ORIENTATION_PERIOD = 22
BrickIMUV2.FUNCTION_SET_LINEAR_ACCELERATION_PERIOD = 24
BrickIMUV2.FUNCTION_SET_GRAVITY_VECTOR_PERIOD = 26
BrickIMUV2.FUNCTION_SET_QUATERNION_PERIOD = 28
BrickIMUV2.FUNCTION_SET_ALL_DATA_PERIOD = 30
BrickIMUV2.FUNCTION_SET_SENSOR_CONFIGURATION = 41
BrickIMUV2.FUNCTION_SET_SENSOR_FUSION_MODE = 43
BrickIMUV2.FUNCTION_SET_SPITFP_BAUDRATE_CONFIG = 231
BrickIMUV2.FUNCTION_SET_SPITFP_BAUDRATE = 234
BrickIMUV2.FUNCTION_ENABLE_STATUS_LED = 238
BrickIMUV2.FUNCTION_DISABLE_STATUS_LED = 239
BrickIMUV2.FUNCTION_RESET = 243
BrickIMUV2.FUNCTION_WRITE_BRICKLET_PLUGIN = 246
- BrickIMUV2.SetResponseExpected(functionId, responseExpected)¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
- responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für die Funktion mit der angegebenen Funktion IDs. Diese Flag kann nur für Setter-Funktionen (Standardwert: false) und Konfigurationsfunktionen für Callbacks (Standardwert: true) geändert werden. Für Getter-Funktionen ist das Flag immer gesetzt.
Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickIMUV2.FUNCTION_LEDS_ON = 10
BrickIMUV2.FUNCTION_LEDS_OFF = 11
BrickIMUV2.FUNCTION_SET_ACCELERATION_PERIOD = 14
BrickIMUV2.FUNCTION_SET_MAGNETIC_FIELD_PERIOD = 16
BrickIMUV2.FUNCTION_SET_ANGULAR_VELOCITY_PERIOD = 18
BrickIMUV2.FUNCTION_SET_TEMPERATURE_PERIOD = 20
BrickIMUV2.FUNCTION_SET_ORIENTATION_PERIOD = 22
BrickIMUV2.FUNCTION_SET_LINEAR_ACCELERATION_PERIOD = 24
BrickIMUV2.FUNCTION_SET_GRAVITY_VECTOR_PERIOD = 26
BrickIMUV2.FUNCTION_SET_QUATERNION_PERIOD = 28
BrickIMUV2.FUNCTION_SET_ALL_DATA_PERIOD = 30
BrickIMUV2.FUNCTION_SET_SENSOR_CONFIGURATION = 41
BrickIMUV2.FUNCTION_SET_SENSOR_FUSION_MODE = 43
BrickIMUV2.FUNCTION_SET_SPITFP_BAUDRATE_CONFIG = 231
BrickIMUV2.FUNCTION_SET_SPITFP_BAUDRATE = 234
BrickIMUV2.FUNCTION_ENABLE_STATUS_LED = 238
BrickIMUV2.FUNCTION_DISABLE_STATUS_LED = 239
BrickIMUV2.FUNCTION_RESET = 243
BrickIMUV2.FUNCTION_WRITE_BRICKLET_PLUGIN = 246
- BrickIMUV2.SetResponseExpectedAll(responseExpected)¶
Eingabe: - responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für alle Setter-Funktionen und Konfigurationsfunktionen für Callbacks diese Gerätes.
Interne Funktionen¶
Interne Funktionen werden für Wartungsaufgaben, wie zum Beispiel das Flashen einer neuen Firmware oder das Ändern der UID eines Bricklets, verwendet. Diese Aufgaben sollten mit Brick Viewer durchgeführt werden, anstelle die internen Funktionen direkt zu verwenden.
- BrickIMUV2.GetProtocol1BrickletName(port) protocolVersion, firmwareVersion, name¶
Eingabe: - port – Typ: Char, Wertebereich: ["a" bis "b"]
Ausgabe: - protocolVersion – Typ: Byte, Wertebereich: [0 bis 255]
- firmwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- name – Typ: String, Länge: bis zu 40
Gibt die Firmware und Protokoll Version und den Namen des Bricklets für einen gegebenen Port zurück.
Der einzige Zweck dieser Funktion ist es, automatischen Flashen von Bricklet v1.x.y Plugins zu ermöglichen.
- BrickIMUV2.WriteBrickletPlugin(port, offset, chunk)¶
Eingabe: - port – Typ: Char, Wertebereich: ["a" bis "b"]
- offset – Typ: Byte, Wertebereich: [0 bis 255]
- chunk – Typ: Byte[32], Wertebereich: [0 bis 255]
Schreibt 32 Bytes Firmware auf das Bricklet, dass am gegebenen Port angeschlossen ist. Die Bytes werden an die Position offset * 32 geschrieben.
Diese Funktion wird vom Brick Viewer während des Flashens benutzt. In einem normalem Nutzerprogramm sollte diese Funktion nicht benötigt werden.
- BrickIMUV2.ReadBrickletPlugin(port, offset) chunk¶
Eingabe: - port – Typ: Char, Wertebereich: ["a" bis "b"]
- offset – Typ: Byte, Wertebereich: [0 bis 255]
Ausgabe: - chunk – Typ: Byte[32], Wertebereich: [0 bis 255]
Liest 32 Bytes Firmware vom Bricklet, dass am gegebenen Port angeschlossen ist. Die Bytes werden ab der Position offset * 32 gelesen.
Diese Funktion wird vom Brick Viewer während des Flashens benutzt. In einem normalem Nutzerprogramm sollte diese Funktion nicht benötigt werden.
Konstanten¶
- BrickIMUV2.DEVICE_IDENTIFIER¶
Diese Konstante wird verwendet um einen IMU Brick 2.0 zu identifizieren.
Die
GetIdentity()Funktion und derIPConnection.EnumerateCallbackCallback der IP Connection haben eindeviceIdentifierParameter um den Typ des Bricks oder Bricklets anzugeben.
- BrickIMUV2.DEVICE_DISPLAY_NAME¶
Diese Konstante stellt den Anzeigenamen eines IMU Brick 2.0 dar.