- Getting Started
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ for Microcontrollers
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Mathematica
- MATLAB/Octave
- MQTT
- Requirements
- Installation
- Testing an Example
- Start up and shut down
- Command line arguments
- API Reference and Examples
- IP Connection
- Bricks
- Bricks (Discontinued)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Discontinued)
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Source Code and Bug Tracking
- Programming Interface
- Kits
- Embedded Boards
- Specifications
MQTT - Tilt Bricklet¶
This is the description of the MQTT API bindings for the Tilt Bricklet. General information and technical specifications for the Tilt Bricklet are summarized in its hardware description.
An installation guide for the MQTT API bindings is part of their general description.
Examples¶
The example code below is Public Domain (CC0 1.0).
Simple¶
1# Change XYZ to the UID of your Tilt Bricklet
2
3setup:
4 # Get current tilt state
5 subscribe to tinkerforge/response/tilt_bricklet/XYZ/get_tilt_state
6 publish '' to tinkerforge/request/tilt_bricklet/XYZ/get_tilt_state
Callback¶
Download (example-callback.txt)
1# Change XYZ to the UID of your Tilt Bricklet
2
3setup:
4 # Enable tilt state callback
5 publish '' to tinkerforge/request/tilt_bricklet/XYZ/enable_tilt_state_callback
6
7 # Handle incoming tilt state callbacks
8 subscribe to tinkerforge/callback/tilt_bricklet/XYZ/tilt_state
9 publish '{"register": true}' to tinkerforge/register/tilt_bricklet/XYZ/tilt_state # Register tilt_state callback
API¶
All published payloads to and from the MQTT bindings are in JSON format.
If an error occures, the bindings publish a JSON object containing the error message as member _ERROR.
It is published on the corresponding response topic: .../response/... for .../request/... and .../callback/... for .../register/....
Basic Functions¶
- request/tilt_bricklet/<UID>/get_tilt_state¶
Request: - empty payload
Response: - state – Type: int, Range: See symbols
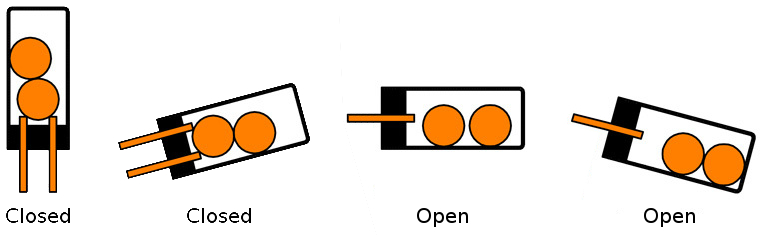
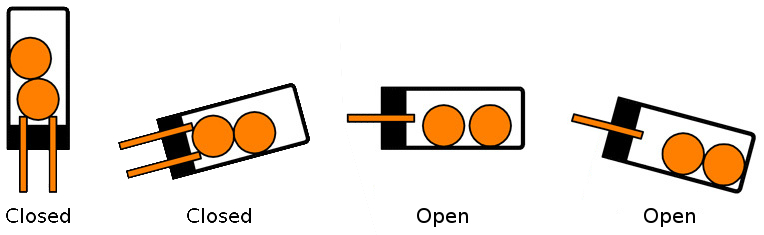
Returns the current tilt state. The state can either be
0 = Closed: The ball in the tilt switch closes the circuit.
1 = Open: The ball in the tilt switch does not close the circuit.
2 = Closed Vibrating: The tilt switch is in motion (rapid change between open and close).
The following symbols are available for this function:
For state:
"closed" = 0
"open" = 1
"closed_vibrating" = 2
Advanced Functions¶
- request/tilt_bricklet/<UID>/get_identity¶
Request: - empty payload
Response: - uid – Type: string, Length: up to 8
- connected_uid – Type: string, Length: up to 8
- position – Type: char, Range: ["a" to "h", "z"]
- hardware_version – Type: [int, ...], Length: 3
- 0: major – Type: int, Range: [0 to 255]
- 1: minor – Type: int, Range: [0 to 255]
- 2: revision – Type: int, Range: [0 to 255]
- firmware_version – Type: [int, ...], Length: 3
- 0: major – Type: int, Range: [0 to 255]
- 1: minor – Type: int, Range: [0 to 255]
- 2: revision – Type: int, Range: [0 to 255]
- device_identifier – Type: int, Range: [0 to 216 - 1]
- _display_name – Type: string
Returns the UID, the UID where the Bricklet is connected to, the position, the hardware and firmware version as well as the device identifier.
The position can be 'a', 'b', 'c', 'd', 'e', 'f', 'g' or 'h' (Bricklet Port). A Bricklet connected to an Isolator Bricklet is always at position 'z'.
The device identifier numbers can be found here. If symbolic output is not disabled, the device identifier is mapped to the corresponding name in the format used in topics.
The display name contains the Tilt's name in a human readable form.
Callback Configuration Functions¶
- request/tilt_bricklet/<UID>/enable_tilt_state_callback¶
Request: - empty payload
Response: - no response
Enables the
register/tilt_bricklet/<UID>/tilt_state()callback.
- request/tilt_bricklet/<UID>/disable_tilt_state_callback¶
Request: - empty payload
Response: - no response
Disables the
register/tilt_bricklet/<UID>/tilt_state()callback.
- request/tilt_bricklet/<UID>/is_tilt_state_callback_enabled¶
Request: - empty payload
Response: - enabled – Type: bool, Default: false
Returns true if the
register/tilt_bricklet/<UID>/tilt_state()callback is enabled.
Callbacks¶
Callbacks can be registered to receive
time critical or recurring data from the device. The registration is done
with the corresponding .../register/... topic and an optional suffix.
This suffix can be used to deregister the callback later.
Note
Using callbacks for recurring events is always preferred compared to using getters. It will use less USB bandwidth and the latency will be a lot better, since there is no round trip time.
- register/tilt_bricklet/<UID>/tilt_state¶
Register Request: - register – Type: bool
Callback Response: - state – Type: int, Range: See symbols
A callback can be registered for this event by publishing to the
.../register/tilt_bricklet/<UID>/tilt_state[/<SUFFIX>]topic with the payload "true". An added callback can be removed by publishing to the same topic with the payload "false". To support multiple (de)registrations, e.g. for message filtering, an optional suffix can be used.If the callback is triggered, a message with it's payload is published under the corresponding
.../callback/tilt_bricklet/<UID>/tilt_state[/<SUFFIX>]topic for each registered suffix.This callback provides the current tilt state. It is called every time the state changes.
See
request/tilt_bricklet/<UID>/get_tilt_state()for a description of the states.The following symbols are available for this function:
For state:
"closed" = 0
"open" = 1
"closed_vibrating" = 2