- Getting Started
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- ESP32 Firmware
- APT Repository
- Device Identifier
- Source Code and Bug Tracking
- Programming Interface
- Kits
- Embedded Boards
- Specifications
LabVIEW - IMU Brick¶
This is the description of the LabVIEW API bindings for the IMU Brick. General information and technical specifications for the IMU Brick are summarized in its hardware description.
An installation guide for the LabVIEW API bindings is part of their general description.
Examples¶
The example code below is Public Domain (CC0 1.0).
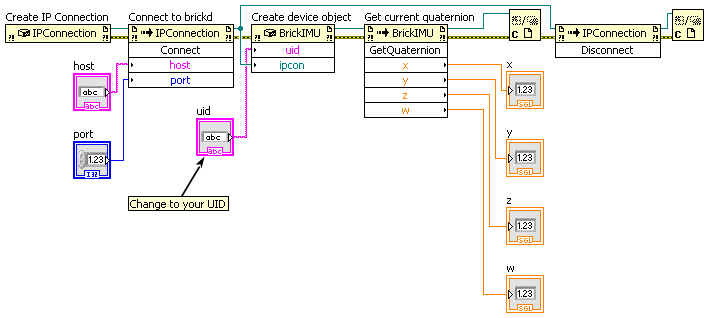
Simple¶
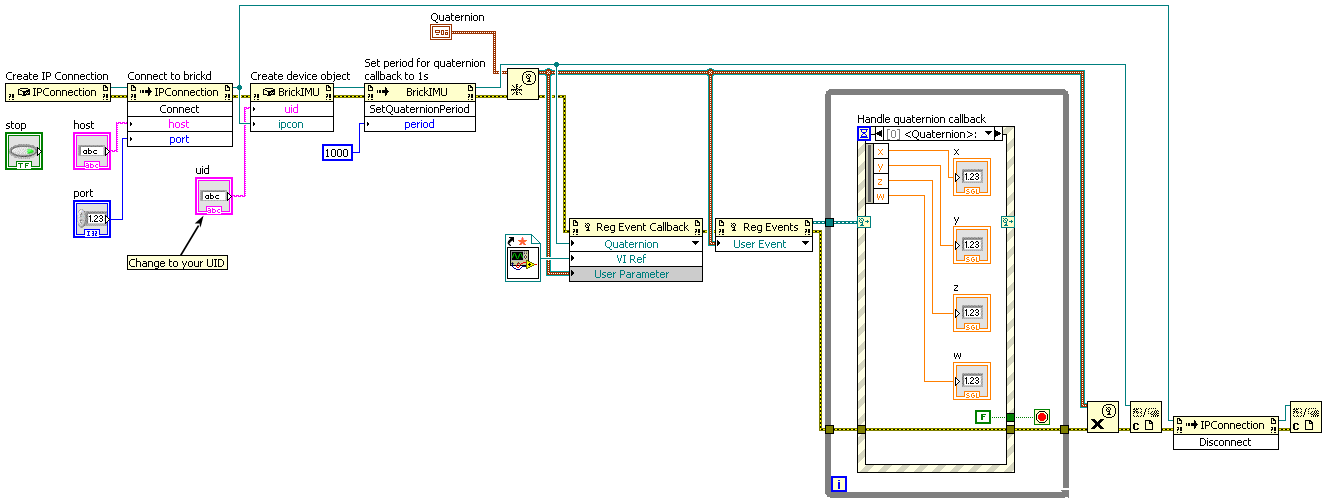
Callback¶
Download (Example Callback.vi), Download (Example Callback - Quaternion Callback.vi)
API¶
Generally, every function of the LabVIEW bindings that outputs a value can
report a Tinkerforge.TimeoutException. This error gets reported if the
device did not respond. If a cable based connection is used, it is
unlikely that this exception gets thrown (assuming nobody plugs the
device out). However, if a wireless connection is used, timeouts will occur
if the distance to the device gets too big.
The namespace for all Brick/Bricklet bindings and the IPConnection is
Tinkerforge.*.
Basic Functions¶
- BrickIMU(uid, ipcon) imu¶
Input: - uid – Type: String
- ipcon – Type: .NET Refnum (IPConnection)
Output: - imu – Type: .NET Refnum (BrickIMU)
Creates an object with the unique device ID
uid. This object can then be used after the IP Connection is connected.
- BrickIMU.GetOrientation() roll, pitch, yaw¶
Output: - roll – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
- pitch – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
- yaw – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
Returns the current orientation (roll, pitch, yaw) of the IMU Brick as Euler angles. Note that Euler angles always experience a gimbal lock.
We recommend that you use quaternions instead.
The order to sequence in which the orientation values should be applied is roll, yaw, pitch.
If you want to get the orientation periodically, it is recommended to use the
OrientationCallbackcallback and set the period withSetOrientationPeriod().
- BrickIMU.GetQuaternion() x, y, z, w¶
Output: - x – Type: Single, Range: [-1.0 to 1.0]
- y – Type: Single, Range: [-1.0 to 1.0]
- z – Type: Single, Range: [-1.0 to 1.0]
- w – Type: Single, Range: [-1.0 to 1.0]
Returns the current orientation (x, y, z, w) of the IMU as quaternions.
You can go from quaternions to Euler angles with the following formula:
xAngle = atan2(2*y*w - 2*x*z, 1 - 2*y*y - 2*z*z) yAngle = atan2(2*x*w - 2*y*z, 1 - 2*x*x - 2*z*z) zAngle = asin(2*x*y + 2*z*w)
This process is not reversible, because of the gimbal lock.
It is also possible to calculate independent angles. You can calculate yaw, pitch and roll in a right-handed vehicle coordinate system according to DIN70000 with:
yaw = atan2(2*x*y + 2*w*z, w*w + x*x - y*y - z*z) pitch = -asin(2*w*y - 2*x*z) roll = -atan2(2*y*z + 2*w*x, -w*w + x*x + y*y - z*z))
Converting the quaternions to an OpenGL transformation matrix is possible with the following formula:
matrix = [[1 - 2*(y*y + z*z), 2*(x*y - w*z), 2*(x*z + w*y), 0], [ 2*(x*y + w*z), 1 - 2*(x*x + z*z), 2*(y*z - w*x), 0], [ 2*(x*z - w*y), 2*(y*z + w*x), 1 - 2*(x*x + y*y), 0], [ 0, 0, 0, 1]]
If you want to get the quaternions periodically, it is recommended to use the
QuaternionCallbackcallback and set the period withSetQuaternionPeriod().
- BrickIMU.LedsOn()¶
Turns the orientation and direction LEDs of the IMU Brick on.
- BrickIMU.LedsOff()¶
Turns the orientation and direction LEDs of the IMU Brick off.
- BrickIMU.AreLedsOn() leds¶
Output: - leds – Type: Boolean, Default: T
Returns true if the orientation and direction LEDs of the IMU Brick are on, false otherwise.
- BrickIMU.SetConvergenceSpeed(speed)¶
Input: - speed – Type: Int32, Unit: 1 °/s, Range: [0 to 216 - 1], Default: 30
Sets the convergence speed of the IMU Brick. The convergence speed determines how the different sensor measurements are fused.
If the orientation of the IMU Brick is off by 10° and the convergence speed is set to 20°/s, it will take 0.5s until the orientation is corrected. However, if the correct orientation is reached and the convergence speed is too high, the orientation will fluctuate with the fluctuations of the accelerometer and the magnetometer.
If you set the convergence speed to 0, practically only the gyroscope is used to calculate the orientation. This gives very smooth movements, but errors of the gyroscope will not be corrected. If you set the convergence speed to something above 500, practically only the magnetometer and the accelerometer are used to calculate the orientation. In this case the movements are abrupt and the values will fluctuate, but there won't be any errors that accumulate over time.
In an application with high angular velocities, we recommend a high convergence speed, so the errors of the gyroscope can be corrected fast. In applications with only slow movements we recommend a low convergence speed. You can change the convergence speed on the fly. So it is possible (and recommended) to increase the convergence speed before an abrupt movement and decrease it afterwards again.
You might want to play around with the convergence speed in the Brick Viewer to get a feeling for a good value for your application.
- BrickIMU.GetConvergenceSpeed() speed¶
Output: - speed – Type: Int32, Unit: 1 °/s, Range: [0 to 216 - 1], Default: 30
Returns the convergence speed as set by
SetConvergenceSpeed().
Advanced Functions¶
- BrickIMU.GetAcceleration() x, y, z¶
Output: - x – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- y – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- z – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
Returns the calibrated acceleration from the accelerometer for the x, y and z axis.
If you want to get the acceleration periodically, it is recommended to use the
AccelerationCallbackcallback and set the period withSetAccelerationPeriod().
- BrickIMU.GetMagneticField() x, y, z¶
Output: - x – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- y – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- z – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
Returns the calibrated magnetic field from the magnetometer for the x, y and z axis.
If you want to get the magnetic field periodically, it is recommended to use the
MagneticFieldCallbackcallback and set the period withSetMagneticFieldPeriod().
- BrickIMU.GetAngularVelocity() x, y, z¶
Output: - x – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- y – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- z – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
Returns the calibrated angular velocity from the gyroscope for the x, y and z axis in °/14.375s (you have to divide by 14.375 to get the value in °/s).
If you want to get the angular velocity periodically, it is recommended to use the
AngularVelocityCallbackcallback and set the period withSetAngularVelocityPeriod().
- BrickIMU.GetAllData() accX, accY, accZ, magX, magY, magZ, angX, angY, angZ, temperature¶
Output: - accX – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- accY – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- accZ – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- magX – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- magY – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- magZ – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- angX – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- angY – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- angZ – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- temperature – Type: Int16, Unit: 1/100 °C, Range: [-215 to 215 - 1]
Returns the data from
GetAcceleration(),GetMagneticField()andGetAngularVelocity()as well as the temperature of the IMU Brick.If you want to get the data periodically, it is recommended to use the
AllDataCallbackcallback and set the period withSetAllDataPeriod().
- BrickIMU.GetIMUTemperature() temperature¶
Output: - temperature – Type: Int16, Unit: 1/100 °C, Range: [-215 to 215 - 1]
Returns the temperature of the IMU Brick.
- BrickIMU.SetAccelerationRange(range)¶
Input: - range – Type: Byte, Range: [0 to 255]
Not implemented yet.
- BrickIMU.GetAccelerationRange() range¶
Output: - range – Type: Byte, Range: [0 to 255]
Not implemented yet.
- BrickIMU.SetMagnetometerRange(range)¶
Input: - range – Type: Byte, Range: [0 to 255]
Not implemented yet.
- BrickIMU.GetMagnetometerRange() range¶
Output: - range – Type: Byte, Range: [0 to 255]
Not implemented yet.
- BrickIMU.SetCalibration(typ, data)¶
Input: - typ – Type: Byte, Range: See constants
- data – Type: Int16[10], Range: [-215 to 215 - 1]
There are several different types that can be calibrated:
Type
Description
Values
0
Accelerometer Gain
[mul x, mul y, mul z, div x, div y, div z, 0, 0, 0, 0]1
Accelerometer Bias
[bias x, bias y, bias z, 0, 0, 0, 0, 0, 0, 0]2
Magnetometer Gain
[mul x, mul y, mul z, div x, div y, div z, 0, 0, 0, 0]3
Magnetometer Bias
[bias x, bias y, bias z, 0, 0, 0, 0, 0, 0, 0]4
Gyroscope Gain
[mul x, mul y, mul z, div x, div y, div z, 0, 0, 0, 0]5
Gyroscope Bias
[bias xl, bias yl, bias zl, temp l, bias xh, bias yh, bias zh, temp h, 0, 0]The calibration via gain and bias is done with the following formula:
new_value = (bias + orig_value) * gain_mul / gain_div
If you really want to write your own calibration software, please keep in mind that you first have to undo the old calibration (set bias to 0 and gain to 1/1) and that you have to average over several thousand values to obtain a usable result in the end.
The gyroscope bias is highly dependent on the temperature, so you have to calibrate the bias two times with different temperatures. The values
xl,yl,zlandtemp lare the bias forx,y,zand the corresponding temperature for a low temperature. The valuesxh,yh,zhandtemp hare the same for a high temperatures. The temperature difference should be at least 5°C. If you have a temperature where the IMU Brick is mostly used, you should use this temperature for one of the sampling points.Note
We highly recommend that you use the Brick Viewer to calibrate your IMU Brick.
The following constants are available for this function:
For typ:
BrickIMU.CALIBRATION_TYPE_ACCELEROMETER_GAIN = 0
BrickIMU.CALIBRATION_TYPE_ACCELEROMETER_BIAS = 1
BrickIMU.CALIBRATION_TYPE_MAGNETOMETER_GAIN = 2
BrickIMU.CALIBRATION_TYPE_MAGNETOMETER_BIAS = 3
BrickIMU.CALIBRATION_TYPE_GYROSCOPE_GAIN = 4
BrickIMU.CALIBRATION_TYPE_GYROSCOPE_BIAS = 5
- BrickIMU.GetCalibration(typ) data¶
Input: - typ – Type: Byte, Range: See constants
Output: - data – Type: Int16[10], Range: [-215 to 215 - 1]
Returns the calibration for a given type as set by
SetCalibration().The following constants are available for this function:
For typ:
BrickIMU.CALIBRATION_TYPE_ACCELEROMETER_GAIN = 0
BrickIMU.CALIBRATION_TYPE_ACCELEROMETER_BIAS = 1
BrickIMU.CALIBRATION_TYPE_MAGNETOMETER_GAIN = 2
BrickIMU.CALIBRATION_TYPE_MAGNETOMETER_BIAS = 3
BrickIMU.CALIBRATION_TYPE_GYROSCOPE_GAIN = 4
BrickIMU.CALIBRATION_TYPE_GYROSCOPE_BIAS = 5
- BrickIMU.OrientationCalculationOn()¶
Turns the orientation calculation of the IMU Brick on.
As default the calculation is on.
New in version 2.0.2$nbsp;(Firmware).
- BrickIMU.OrientationCalculationOff()¶
Turns the orientation calculation of the IMU Brick off.
If the calculation is off,
GetOrientation()will return the last calculated value until the calculation is turned on again.The trigonometric functions that are needed to calculate the orientation are very expensive. We recommend to turn the orientation calculation off if the orientation is not needed, to free calculation time for the sensor fusion algorithm.
As default the calculation is on.
New in version 2.0.2$nbsp;(Firmware).
- BrickIMU.IsOrientationCalculationOn() orientationCalculationOn¶
Output: - orientationCalculationOn – Type: Boolean, Default: T
Returns true if the orientation calculation of the IMU Brick is on, false otherwise.
New in version 2.0.2$nbsp;(Firmware).
- BrickIMU.SetSPITFPBaudrateConfig(enableDynamicBaudrate, minimumDynamicBaudrate)¶
Input: - enableDynamicBaudrate – Type: Boolean, Default: T
- minimumDynamicBaudrate – Type: Int64, Unit: 1 Bd, Range: [400000 to 2000000], Default: 400000
The SPITF protocol can be used with a dynamic baudrate. If the dynamic baudrate is enabled, the Brick will try to adapt the baudrate for the communication between Bricks and Bricklets according to the amount of data that is transferred.
The baudrate will be increased exponentially if lots of data is sent/received and decreased linearly if little data is sent/received.
This lowers the baudrate in applications where little data is transferred (e.g. a weather station) and increases the robustness. If there is lots of data to transfer (e.g. Thermal Imaging Bricklet) it automatically increases the baudrate as needed.
In cases where some data has to transferred as fast as possible every few seconds (e.g. RS485 Bricklet with a high baudrate but small payload) you may want to turn the dynamic baudrate off to get the highest possible performance.
The maximum value of the baudrate can be set per port with the function
SetSPITFPBaudrate(). If the dynamic baudrate is disabled, the baudrate as set bySetSPITFPBaudrate()will be used statically.New in version 2.3.5$nbsp;(Firmware).
- BrickIMU.GetSPITFPBaudrateConfig() enableDynamicBaudrate, minimumDynamicBaudrate¶
Output: - enableDynamicBaudrate – Type: Boolean, Default: T
- minimumDynamicBaudrate – Type: Int64, Unit: 1 Bd, Range: [400000 to 2000000], Default: 400000
Returns the baudrate config, see
SetSPITFPBaudrateConfig().New in version 2.3.5$nbsp;(Firmware).
- BrickIMU.GetSendTimeoutCount(communicationMethod) timeoutCount¶
Input: - communicationMethod – Type: Byte, Range: See constants
Output: - timeoutCount – Type: Int64, Range: [0 to 232 - 1]
Returns the timeout count for the different communication methods.
The methods 0-2 are available for all Bricks, 3-7 only for Master Bricks.
This function is mostly used for debugging during development, in normal operation the counters should nearly always stay at 0.
The following constants are available for this function:
For communicationMethod:
BrickIMU.COMMUNICATION_METHOD_NONE = 0
BrickIMU.COMMUNICATION_METHOD_USB = 1
BrickIMU.COMMUNICATION_METHOD_SPI_STACK = 2
BrickIMU.COMMUNICATION_METHOD_CHIBI = 3
BrickIMU.COMMUNICATION_METHOD_RS485 = 4
BrickIMU.COMMUNICATION_METHOD_WIFI = 5
BrickIMU.COMMUNICATION_METHOD_ETHERNET = 6
BrickIMU.COMMUNICATION_METHOD_WIFI_V2 = 7
New in version 2.3.3$nbsp;(Firmware).
- BrickIMU.SetSPITFPBaudrate(brickletPort, baudrate)¶
Input: - brickletPort – Type: Char, Range: ["a" to "b"]
- baudrate – Type: Int64, Unit: 1 Bd, Range: [400000 to 2000000], Default: 1400000
Sets the baudrate for a specific Bricklet port.
If you want to increase the throughput of Bricklets you can increase the baudrate. If you get a high error count because of high interference (see
GetSPITFPErrorCount()) you can decrease the baudrate.If the dynamic baudrate feature is enabled, the baudrate set by this function corresponds to the maximum baudrate (see
SetSPITFPBaudrateConfig()).Regulatory testing is done with the default baudrate. If CE compatibility or similar is necessary in your applications we recommend to not change the baudrate.
New in version 2.3.3$nbsp;(Firmware).
- BrickIMU.GetSPITFPBaudrate(brickletPort) baudrate¶
Input: - brickletPort – Type: Char, Range: ["a" to "b"]
Output: - baudrate – Type: Int64, Unit: 1 Bd, Range: [400000 to 2000000], Default: 1400000
Returns the baudrate for a given Bricklet port, see
SetSPITFPBaudrate().New in version 2.3.3$nbsp;(Firmware).
- BrickIMU.GetSPITFPErrorCount(brickletPort) errorCountACKChecksum, errorCountMessageChecksum, errorCountFrame, errorCountOverflow¶
Input: - brickletPort – Type: Char, Range: ["a" to "b"]
Output: - errorCountACKChecksum – Type: Int64, Range: [0 to 232 - 1]
- errorCountMessageChecksum – Type: Int64, Range: [0 to 232 - 1]
- errorCountFrame – Type: Int64, Range: [0 to 232 - 1]
- errorCountOverflow – Type: Int64, Range: [0 to 232 - 1]
Returns the error count for the communication between Brick and Bricklet.
The errors are divided into
ACK checksum errors,
message checksum errors,
framing errors and
overflow errors.
The errors counts are for errors that occur on the Brick side. All Bricklets have a similar function that returns the errors on the Bricklet side.
New in version 2.3.3$nbsp;(Firmware).
- BrickIMU.EnableStatusLED()¶
Enables the status LED.
The status LED is the blue LED next to the USB connector. If enabled is is on and it flickers if data is transfered. If disabled it is always off.
The default state is enabled.
New in version 2.3.1$nbsp;(Firmware).
- BrickIMU.DisableStatusLED()¶
Disables the status LED.
The status LED is the blue LED next to the USB connector. If enabled is is on and it flickers if data is transfered. If disabled it is always off.
The default state is enabled.
New in version 2.3.1$nbsp;(Firmware).
- BrickIMU.IsStatusLEDEnabled() enabled¶
Output: - enabled – Type: Boolean, Default: T
Returns true if the status LED is enabled, false otherwise.
New in version 2.3.1$nbsp;(Firmware).
- BrickIMU.GetChipTemperature() temperature¶
Output: - temperature – Type: Int16, Unit: 1/10 °C, Range: [-215 to 215 - 1]
Returns the temperature as measured inside the microcontroller. The value returned is not the ambient temperature!
The temperature is only proportional to the real temperature and it has an accuracy of ±15%. Practically it is only useful as an indicator for temperature changes.
- BrickIMU.Reset()¶
Calling this function will reset the Brick. Calling this function on a Brick inside of a stack will reset the whole stack.
After a reset you have to create new device objects, calling functions on the existing ones will result in undefined behavior!
- BrickIMU.GetIdentity() uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶
Output: - uid – Type: String, Length: up to 8
- connectedUid – Type: String, Length: up to 8
- position – Type: Char, Range: ["0" to "8"]
- hardwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- firmwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- deviceIdentifier – Type: Int32, Range: [0 to 216 - 1]
Returns the UID, the UID where the Brick is connected to, the position, the hardware and firmware version as well as the device identifier.
The position is the position in the stack from '0' (bottom) to '8' (top).
The device identifier numbers can be found here. There is also a constant for the device identifier of this Brick.
Callback Configuration Functions¶
- BrickIMU.SetAccelerationPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
AccelerationCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetAccelerationPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetAccelerationPeriod().
- BrickIMU.SetMagneticFieldPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
MagneticFieldCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetMagneticFieldPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetMagneticFieldPeriod().
- BrickIMU.SetAngularVelocityPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
AngularVelocityCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetAngularVelocityPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetAngularVelocityPeriod().
- BrickIMU.SetAllDataPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
AllDataCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetAllDataPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetAllDataPeriod().
- BrickIMU.SetOrientationPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
OrientationCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetOrientationPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetOrientationPeriod().
- BrickIMU.SetQuaternionPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
QuaternionCallbackcallback is triggered periodically. A value of 0 turns the callback off.
- BrickIMU.GetQuaternionPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetQuaternionPeriod().
Callbacks¶
Callbacks can be registered to receive time critical or recurring data from the device. The registration is done by assigning a function to a callback property of the device object. The available callback property and their type of parameters are described below.
Note
Using callbacks for recurring events is always preferred compared to using getters. It will use less USB bandwidth and the latency will be a lot better, since there is no round trip time.
- event BrickIMU.AccelerationCallback sender, x, y, z¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- x – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- y – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- z – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
This callback is triggered periodically with the period that is set by
SetAccelerationPeriod(). The parameters are the acceleration for the x, y and z axis.
- event BrickIMU.MagneticFieldCallback sender, x, y, z¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- x – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- y – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- z – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
This callback is triggered periodically with the period that is set by
SetMagneticFieldPeriod(). The parameters are the magnetic field for the x, y and z axis.
- event BrickIMU.AngularVelocityCallback sender, x, y, z¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- x – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- y – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- z – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
This callback is triggered periodically with the period that is set by
SetAngularVelocityPeriod(). The parameters are the angular velocity for the x, y and z axis.
- event BrickIMU.AllDataCallback sender, accX, accY, accZ, magX, magY, magZ, angX, angY, angZ, temperature¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- accX – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- accY – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- accZ – Type: Int16, Unit: 1/1000 gₙ, Range: [-215 to 215 - 1]
- magX – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- magY – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- magZ – Type: Int16, Unit: 1/10 µT, Range: [-215 to 215 - 1]
- angX – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- angY – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- angZ – Type: Int16, Unit: 8/115 °/s, Range: [-28750 to 28750]
- temperature – Type: Int16, Unit: 1/100 °C, Range: [-215 to 215 - 1]
This callback is triggered periodically with the period that is set by
SetAllDataPeriod(). The parameters are the acceleration, the magnetic field and the angular velocity for the x, y and z axis as well as the temperature of the IMU Brick.
- event BrickIMU.OrientationCallback sender, roll, pitch, yaw¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- roll – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
- pitch – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
- yaw – Type: Int16, Unit: 1/100 °, Range: [-18000 to 18000]
This callback is triggered periodically with the period that is set by
SetOrientationPeriod(). The parameters are the orientation (roll, pitch and yaw) of the IMU Brick in Euler angles. SeeGetOrientation()for details.
- event BrickIMU.QuaternionCallback sender, x, y, z, w¶
Callback Output: - sender – Type: .NET Refnum (BrickIMU)
- x – Type: Single, Range: [-1.0 to 1.0]
- y – Type: Single, Range: [-1.0 to 1.0]
- z – Type: Single, Range: [-1.0 to 1.0]
- w – Type: Single, Range: [-1.0 to 1.0]
This callback is triggered periodically with the period that is set by
SetQuaternionPeriod(). The parameters are the orientation (x, y, z, w) of the IMU Brick in quaternions. SeeGetQuaternion()for details.
Virtual Functions¶
Virtual functions don't communicate with the device itself, but operate only on the API bindings device object. They can be called without the corresponding IP Connection object being connected.
- BrickIMU.GetAPIVersion() apiVersion¶
Output: - apiVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
Returns the version of the API definition implemented by this API bindings. This is neither the release version of this API bindings nor does it tell you anything about the represented Brick or Bricklet.
- BrickIMU.GetResponseExpected(functionId) responseExpected¶
Input: - functionId – Type: Byte, Range: See constants
Output: - responseExpected – Type: Boolean
Returns the response expected flag for the function specified by the function ID parameter. It is true if the function is expected to send a response, false otherwise.
For getter functions this is enabled by default and cannot be disabled, because those functions will always send a response. For callback configuration functions it is enabled by default too, but can be disabled by
SetResponseExpected(). For setter functions it is disabled by default and can be enabled.Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BrickIMU.FUNCTION_LEDS_ON = 8
BrickIMU.FUNCTION_LEDS_OFF = 9
BrickIMU.FUNCTION_SET_ACCELERATION_RANGE = 11
BrickIMU.FUNCTION_SET_MAGNETOMETER_RANGE = 13
BrickIMU.FUNCTION_SET_CONVERGENCE_SPEED = 15
BrickIMU.FUNCTION_SET_CALIBRATION = 17
BrickIMU.FUNCTION_SET_ACCELERATION_PERIOD = 19
BrickIMU.FUNCTION_SET_MAGNETIC_FIELD_PERIOD = 21
BrickIMU.FUNCTION_SET_ANGULAR_VELOCITY_PERIOD = 23
BrickIMU.FUNCTION_SET_ALL_DATA_PERIOD = 25
BrickIMU.FUNCTION_SET_ORIENTATION_PERIOD = 27
BrickIMU.FUNCTION_SET_QUATERNION_PERIOD = 29
BrickIMU.FUNCTION_ORIENTATION_CALCULATION_ON = 37
BrickIMU.FUNCTION_ORIENTATION_CALCULATION_OFF = 38
BrickIMU.FUNCTION_SET_SPITFP_BAUDRATE_CONFIG = 231
BrickIMU.FUNCTION_SET_SPITFP_BAUDRATE = 234
BrickIMU.FUNCTION_ENABLE_STATUS_LED = 238
BrickIMU.FUNCTION_DISABLE_STATUS_LED = 239
BrickIMU.FUNCTION_RESET = 243
BrickIMU.FUNCTION_WRITE_BRICKLET_PLUGIN = 246
- BrickIMU.SetResponseExpected(functionId, responseExpected)¶
Input: - functionId – Type: Byte, Range: See constants
- responseExpected – Type: Boolean
Changes the response expected flag of the function specified by the function ID parameter. This flag can only be changed for setter (default value: false) and callback configuration functions (default value: true). For getter functions it is always enabled.
Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BrickIMU.FUNCTION_LEDS_ON = 8
BrickIMU.FUNCTION_LEDS_OFF = 9
BrickIMU.FUNCTION_SET_ACCELERATION_RANGE = 11
BrickIMU.FUNCTION_SET_MAGNETOMETER_RANGE = 13
BrickIMU.FUNCTION_SET_CONVERGENCE_SPEED = 15
BrickIMU.FUNCTION_SET_CALIBRATION = 17
BrickIMU.FUNCTION_SET_ACCELERATION_PERIOD = 19
BrickIMU.FUNCTION_SET_MAGNETIC_FIELD_PERIOD = 21
BrickIMU.FUNCTION_SET_ANGULAR_VELOCITY_PERIOD = 23
BrickIMU.FUNCTION_SET_ALL_DATA_PERIOD = 25
BrickIMU.FUNCTION_SET_ORIENTATION_PERIOD = 27
BrickIMU.FUNCTION_SET_QUATERNION_PERIOD = 29
BrickIMU.FUNCTION_ORIENTATION_CALCULATION_ON = 37
BrickIMU.FUNCTION_ORIENTATION_CALCULATION_OFF = 38
BrickIMU.FUNCTION_SET_SPITFP_BAUDRATE_CONFIG = 231
BrickIMU.FUNCTION_SET_SPITFP_BAUDRATE = 234
BrickIMU.FUNCTION_ENABLE_STATUS_LED = 238
BrickIMU.FUNCTION_DISABLE_STATUS_LED = 239
BrickIMU.FUNCTION_RESET = 243
BrickIMU.FUNCTION_WRITE_BRICKLET_PLUGIN = 246
- BrickIMU.SetResponseExpectedAll(responseExpected)¶
Input: - responseExpected – Type: Boolean
Changes the response expected flag for all setter and callback configuration functions of this device at once.
Internal Functions¶
Internal functions are used for maintenance tasks such as flashing a new firmware of changing the UID of a Bricklet. These task should be performed using Brick Viewer instead of using the internal functions directly.
- BrickIMU.GetProtocol1BrickletName(port) protocolVersion, firmwareVersion, name¶
Input: - port – Type: Char, Range: ["a" to "b"]
Output: - protocolVersion – Type: Byte, Range: [0 to 255]
- firmwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- name – Type: String, Length: up to 40
Returns the firmware and protocol version and the name of the Bricklet for a given port.
This functions sole purpose is to allow automatic flashing of v1.x.y Bricklet plugins.
- BrickIMU.WriteBrickletPlugin(port, offset, chunk)¶
Input: - port – Type: Char, Range: ["a" to "b"]
- offset – Type: Byte, Range: [0 to 255]
- chunk – Type: Byte[32], Range: [0 to 255]
Writes 32 bytes of firmware to the bricklet attached at the given port. The bytes are written to the position offset * 32.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
- BrickIMU.ReadBrickletPlugin(port, offset) chunk¶
Input: - port – Type: Char, Range: ["a" to "b"]
- offset – Type: Byte, Range: [0 to 255]
Output: - chunk – Type: Byte[32], Range: [0 to 255]
Reads 32 bytes of firmware from the bricklet attached at the given port. The bytes are read starting at the position offset * 32.
This function is used by Brick Viewer during flashing. It should not be necessary to call it in a normal user program.
Constants¶
- BrickIMU.DEVICE_IDENTIFIER¶
This constant is used to identify a IMU Brick.
The
GetIdentity()function and theIPConnection.EnumerateCallbackcallback of the IP Connection have adeviceIdentifierparameter to specify the Brick's or Bricklet's type.
- BrickIMU.DEVICE_DISPLAY_NAME¶
This constant represents the human readable name of a IMU Brick.