- Getting Started
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ for Microcontrollers
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Requirements
- Installation
- Testing an Example
- API Reference and Examples
- IP Connection
- Bricks
- Bricks (Discontinued)
- Bricklets
- Bricklets (Discontinued)
- Accelerometer Bricklet
- Ambient Light Bricklet
- Ambient Light Bricklet 2.0
- Analog In Bricklet
- Analog In Bricklet 2.0
- Analog Out Bricklet
- Analog Out Bricklet 2.0
- CO2 Bricklet
- Current12 Bricklet
- Current25 Bricklet
- Distance US Bricklet
- Dual Button Bricklet
- Dual Relay Bricklet
- GPS Bricklet
- Humidity Bricklet
- Industrial Analog Out Bricklet
- Industrial Digital In 4 Bricklet
- Industrial Dual Analog In Bricklet
- Industrial Quad Relay Bricklet
- IO-4 Bricklet
- Laser Range Finder Bricklet
- LCD 16x2 Bricklet
- LED Strip Bricklet
- Load Cell Bricklet
- Moisture Bricklet
- Motion Detector Bricklet
- NFC/RFID Bricklet
- OLED 128x64 Bricklet
- Piezo Buzzer Bricklet
- PTC Bricklet
- PTC Bricklet 2.0
- Remote Switch Bricklet
- RGB LED Bricklet
- RGB LED Matrix Bricklet
- Rotary Encoder Bricklet
- Solid State Relay Bricklet
- Temperature IR Bricklet
- Thermocouple Bricklet
- UV Light Bricklet
- Voltage Bricklet
- Voltage/Current Bricklet
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Source Code and Bug Tracking
- Programming Interface
- Kits
- Embedded Boards
- Specifications
LabVIEW - GPS Bricklet¶
This is the description of the LabVIEW API bindings for the GPS Bricklet. General information and technical specifications for the GPS Bricklet are summarized in its hardware description.
An installation guide for the LabVIEW API bindings is part of their general description.
Examples¶
The example code below is Public Domain (CC0 1.0).
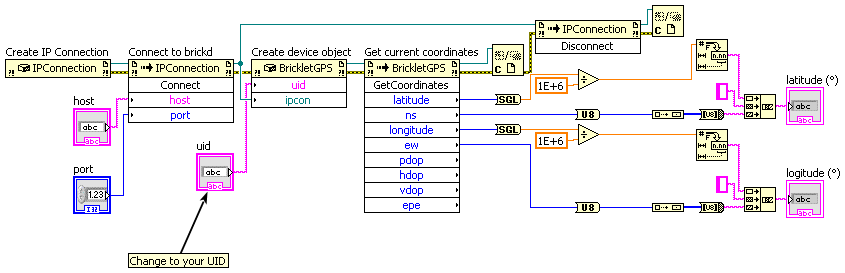
Simple¶
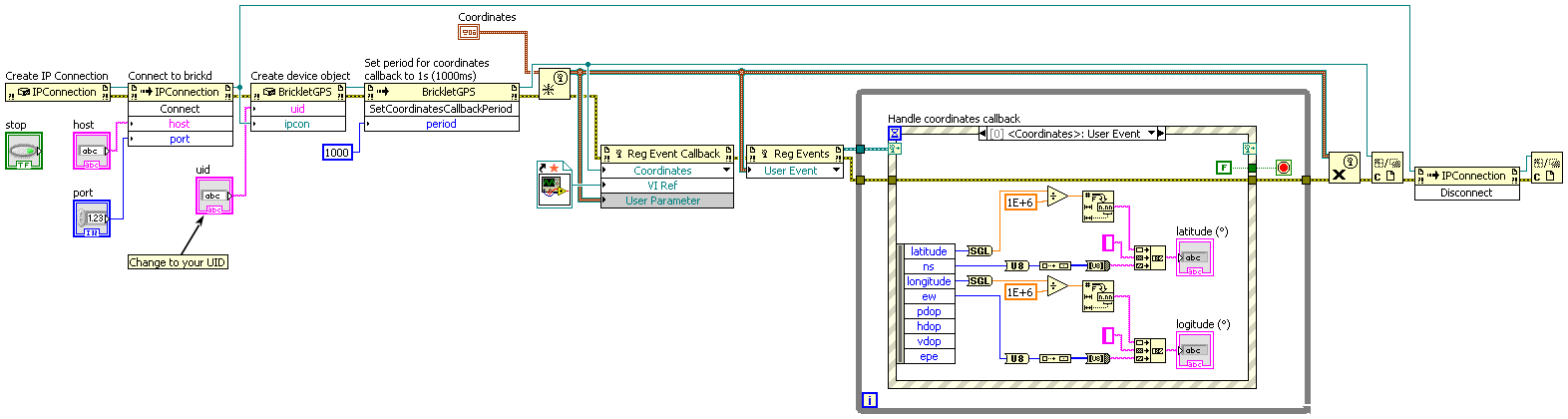
Callback¶
Download (Example Callback.vi), Download (Example Callback - Coordinates Callback.vi)
API¶
Generally, every function of the LabVIEW bindings that outputs a value can
report a Tinkerforge.TimeoutException. This error gets reported if the
device did not respond. If a cable based connection is used, it is
unlikely that this exception gets thrown (assuming nobody plugs the
device out). However, if a wireless connection is used, timeouts will occur
if the distance to the device gets too big.
The namespace for all Brick/Bricklet bindings and the IPConnection is
Tinkerforge.*.
Basic Functions¶
- BrickletGPS(uid, ipcon) gps¶
Input: - uid – Type: String
- ipcon – Type: .NET Refnum (IPConnection)
Output: - gps – Type: .NET Refnum (BrickletGPS)
Creates an object with the unique device ID
uid. This object can then be used after the IP Connection is connected.
- BrickletGPS.GetCoordinates() latitude, ns, longitude, ew, pdop, hdop, vdop, epe¶
Output: - latitude – Type: Int64, Unit: 1/1000000 °, Range: [0 to 90000000]
- ns – Type: Char, Range: ["N", "S"]
- longitude – Type: Int64, Unit: 1/1000000 °, Range: [0 to 180000000]
- ew – Type: Char, Range: ["E", "W"]
- pdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- hdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- vdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- epe – Type: Int32, Unit: 1 cm, Range: [0 to 216 - 1]
Returns the GPS coordinates. Latitude and longitude are given in the
DD.dddddd°format, the value 57123468 means 57.123468°. The parameternsandeware the cardinal directions for latitude and longitude. Possible values fornsandeware 'N', 'S', 'E' and 'W' (north, south, east and west).PDOP, HDOP and VDOP are the dilution of precision (DOP) values. They specify the additional multiplicative effect of GPS satellite geometry on GPS precision. See here for more information.
EPE is the "Estimated Position Error". This is not the absolute maximum error, it is the error with a specific confidence. See here for more information.
This data is only valid if there is currently a fix as indicated by
GetStatus().
- BrickletGPS.GetStatus() fix, satellitesView, satellitesUsed¶
Output: - fix – Type: Byte, Range: See constants
- satellitesView – Type: Byte, Range: [0 to 255]
- satellitesUsed – Type: Byte, Range: [0 to 255]
Returns the current fix status, the number of satellites that are in view and the number of satellites that are currently used.
Possible fix status values can be:
Value
Description
1
No Fix,
GetCoordinates(),GetAltitude()andGetMotion()return invalid data2
2D Fix, only
GetCoordinates()andGetMotion()return valid data3
3D Fix,
GetCoordinates(),GetAltitude()andGetMotion()return valid dataThere is also a blue LED on the Bricklet that indicates the fix status.
The following constants are available for this function:
For fix:
BrickletGPS.FIX_NO_FIX = 1
BrickletGPS.FIX_2D_FIX = 2
BrickletGPS.FIX_3D_FIX = 3
- BrickletGPS.GetAltitude() altitude, geoidalSeparation¶
Output: - altitude – Type: Int32, Unit: 1 cm, Range: [-231 to 231 - 1]
- geoidalSeparation – Type: Int32, Unit: 1 cm, Range: [-231 to 231 - 1]
Returns the current altitude and corresponding geoidal separation.
This data is only valid if there is currently a fix as indicated by
GetStatus().
- BrickletGPS.GetMotion() course, speed¶
Output: - course – Type: Int64, Unit: 1/100 °, Range: [0 to 36000]
- speed – Type: Int64, Unit: 1/100 km/h, Range: [0 to 232 - 1]
Returns the current course and speed. A course of 0° means the Bricklet is traveling north bound and 90° means it is traveling east bound.
Please note that this only returns useful values if an actual movement is present.
This data is only valid if there is currently a fix as indicated by
GetStatus().
- BrickletGPS.GetDateTime() date, time¶
Output: - date – Type: Int64, Range: [10100 to 311299]
- time – Type: Int64, Range: [0 to 235959999]
Returns the current date and time. The date is given in the format
ddmmyyand the time is given in the formathhmmss.sss. For example, 140713 means 14.07.13 as date and 195923568 means 19:59:23.568 as time.
Advanced Functions¶
- BrickletGPS.Restart(restartType)¶
Input: - restartType – Type: Byte, Range: See constants
Restarts the GPS Bricklet, the following restart types are available:
Value
Description
0
Hot start (use all available data in the NV store)
1
Warm start (don't use ephemeris at restart)
2
Cold start (don't use time, position, almanacs and ephemeris at restart)
3
Factory reset (clear all system/user configurations at restart)
The following constants are available for this function:
For restartType:
BrickletGPS.RESTART_TYPE_HOT_START = 0
BrickletGPS.RESTART_TYPE_WARM_START = 1
BrickletGPS.RESTART_TYPE_COLD_START = 2
BrickletGPS.RESTART_TYPE_FACTORY_RESET = 3
- BrickletGPS.GetIdentity() uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶
Output: - uid – Type: String, Length: up to 8
- connectedUid – Type: String, Length: up to 8
- position – Type: Char, Range: ["a" to "h", "z"]
- hardwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- firmwareVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
- deviceIdentifier – Type: Int32, Range: [0 to 216 - 1]
Returns the UID, the UID where the Bricklet is connected to, the position, the hardware and firmware version as well as the device identifier.
The position can be 'a', 'b', 'c', 'd', 'e', 'f', 'g' or 'h' (Bricklet Port). A Bricklet connected to an Isolator Bricklet is always at position 'z'.
The device identifier numbers can be found here. There is also a constant for the device identifier of this Bricklet.
Callback Configuration Functions¶
- BrickletGPS.SetCoordinatesCallbackPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
CoordinatesCallbackcallback is triggered periodically. A value of 0 turns the callback off.The
CoordinatesCallbackcallback is only triggered if the coordinates changed since the last triggering.
- BrickletGPS.GetCoordinatesCallbackPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetCoordinatesCallbackPeriod().
- BrickletGPS.SetStatusCallbackPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
StatusCallbackcallback is triggered periodically. A value of 0 turns the callback off.The
StatusCallbackcallback is only triggered if the status changed since the last triggering.
- BrickletGPS.GetStatusCallbackPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetStatusCallbackPeriod().
- BrickletGPS.SetAltitudeCallbackPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
AltitudeCallbackcallback is triggered periodically. A value of 0 turns the callback off.The
AltitudeCallbackcallback is only triggered if the altitude changed since the last triggering.
- BrickletGPS.GetAltitudeCallbackPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetAltitudeCallbackPeriod().
- BrickletGPS.SetMotionCallbackPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
MotionCallbackcallback is triggered periodically. A value of 0 turns the callback off.The
MotionCallbackcallback is only triggered if the motion changed since the last triggering.
- BrickletGPS.GetMotionCallbackPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetMotionCallbackPeriod().
- BrickletGPS.SetDateTimeCallbackPeriod(period)¶
Input: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Sets the period with which the
DateTimeCallbackcallback is triggered periodically. A value of 0 turns the callback off.The
DateTimeCallbackcallback is only triggered if the date or time changed since the last triggering.
- BrickletGPS.GetDateTimeCallbackPeriod() period¶
Output: - period – Type: Int64, Unit: 1 ms, Range: [0 to 232 - 1], Default: 0
Returns the period as set by
SetDateTimeCallbackPeriod().
Callbacks¶
Callbacks can be registered to receive time critical or recurring data from the device. The registration is done by assigning a function to a callback property of the device object. The available callback property and their type of parameters are described below.
Note
Using callbacks for recurring events is always preferred compared to using getters. It will use less USB bandwidth and the latency will be a lot better, since there is no round trip time.
- event BrickletGPS.CoordinatesCallback sender, latitude, ns, longitude, ew, pdop, hdop, vdop, epe¶
Callback Output: - sender – Type: .NET Refnum (BrickletGPS)
- latitude – Type: Int64, Unit: 1/1000000 °, Range: [0 to 90000000]
- ns – Type: Char, Range: ["N", "S"]
- longitude – Type: Int64, Unit: 1/1000000 °, Range: [0 to 180000000]
- ew – Type: Char, Range: ["E", "W"]
- pdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- hdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- vdop – Type: Int32, Unit: 1/100, Range: [0 to 216 - 1]
- epe – Type: Int32, Unit: 1 cm, Range: [0 to 216 - 1]
This callback is triggered periodically with the period that is set by
SetCoordinatesCallbackPeriod(). The parameters are the same as forGetCoordinates().The
CoordinatesCallbackcallback is only triggered if the coordinates changed since the last triggering and if there is currently a fix as indicated byGetStatus().
- event BrickletGPS.StatusCallback sender, fix, satellitesView, satellitesUsed¶
Callback Output: - sender – Type: .NET Refnum (BrickletGPS)
- fix – Type: Byte, Range: See constants
- satellitesView – Type: Byte, Range: [0 to 255]
- satellitesUsed – Type: Byte, Range: [0 to 255]
This callback is triggered periodically with the period that is set by
SetStatusCallbackPeriod(). The parameters are the same as forGetStatus().The
StatusCallbackcallback is only triggered if the status changed since the last triggering.The following constants are available for this function:
For fix:
BrickletGPS.FIX_NO_FIX = 1
BrickletGPS.FIX_2D_FIX = 2
BrickletGPS.FIX_3D_FIX = 3
- event BrickletGPS.AltitudeCallback sender, altitude, geoidalSeparation¶
Callback Output: - sender – Type: .NET Refnum (BrickletGPS)
- altitude – Type: Int32, Unit: 1 cm, Range: [-231 to 231 - 1]
- geoidalSeparation – Type: Int32, Unit: 1 cm, Range: [-231 to 231 - 1]
This callback is triggered periodically with the period that is set by
SetAltitudeCallbackPeriod(). The parameters are the same as forGetAltitude().The
AltitudeCallbackcallback is only triggered if the altitude changed since the last triggering and if there is currently a fix as indicated byGetStatus().
- event BrickletGPS.MotionCallback sender, course, speed¶
Callback Output: - sender – Type: .NET Refnum (BrickletGPS)
- course – Type: Int64, Unit: 1/100 °, Range: [0 to 36000]
- speed – Type: Int64, Unit: 1/100 km/h, Range: [0 to 232 - 1]
This callback is triggered periodically with the period that is set by
SetMotionCallbackPeriod(). The parameters are the same as forGetMotion().The
MotionCallbackcallback is only triggered if the motion changed since the last triggering and if there is currently a fix as indicated byGetStatus().
- event BrickletGPS.DateTimeCallback sender, date, time¶
Callback Output: - sender – Type: .NET Refnum (BrickletGPS)
- date – Type: Int64, Range: [10100 to 311299]
- time – Type: Int64, Range: [0 to 235959999]
This callback is triggered periodically with the period that is set by
SetDateTimeCallbackPeriod(). The parameters are the same as forGetDateTime().The
DateTimeCallbackcallback is only triggered if the date or time changed since the last triggering.
Virtual Functions¶
Virtual functions don't communicate with the device itself, but operate only on the API bindings device object. They can be called without the corresponding IP Connection object being connected.
- BrickletGPS.GetAPIVersion() apiVersion¶
Output: - apiVersion – Type: Byte[3]
- 0: major – Type: Byte, Range: [0 to 255]
- 1: minor – Type: Byte, Range: [0 to 255]
- 2: revision – Type: Byte, Range: [0 to 255]
Returns the version of the API definition implemented by this API bindings. This is neither the release version of this API bindings nor does it tell you anything about the represented Brick or Bricklet.
- BrickletGPS.GetResponseExpected(functionId) responseExpected¶
Input: - functionId – Type: Byte, Range: See constants
Output: - responseExpected – Type: Boolean
Returns the response expected flag for the function specified by the function ID parameter. It is true if the function is expected to send a response, false otherwise.
For getter functions this is enabled by default and cannot be disabled, because those functions will always send a response. For callback configuration functions it is enabled by default too, but can be disabled by
SetResponseExpected(). For setter functions it is disabled by default and can be enabled.Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BrickletGPS.FUNCTION_RESTART = 6
BrickletGPS.FUNCTION_SET_COORDINATES_CALLBACK_PERIOD = 7
BrickletGPS.FUNCTION_SET_STATUS_CALLBACK_PERIOD = 9
BrickletGPS.FUNCTION_SET_ALTITUDE_CALLBACK_PERIOD = 11
BrickletGPS.FUNCTION_SET_MOTION_CALLBACK_PERIOD = 13
BrickletGPS.FUNCTION_SET_DATE_TIME_CALLBACK_PERIOD = 15
- BrickletGPS.SetResponseExpected(functionId, responseExpected)¶
Input: - functionId – Type: Byte, Range: See constants
- responseExpected – Type: Boolean
Changes the response expected flag of the function specified by the function ID parameter. This flag can only be changed for setter (default value: false) and callback configuration functions (default value: true). For getter functions it is always enabled.
Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BrickletGPS.FUNCTION_RESTART = 6
BrickletGPS.FUNCTION_SET_COORDINATES_CALLBACK_PERIOD = 7
BrickletGPS.FUNCTION_SET_STATUS_CALLBACK_PERIOD = 9
BrickletGPS.FUNCTION_SET_ALTITUDE_CALLBACK_PERIOD = 11
BrickletGPS.FUNCTION_SET_MOTION_CALLBACK_PERIOD = 13
BrickletGPS.FUNCTION_SET_DATE_TIME_CALLBACK_PERIOD = 15
- BrickletGPS.SetResponseExpectedAll(responseExpected)¶
Input: - responseExpected – Type: Boolean
Changes the response expected flag for all setter and callback configuration functions of this device at once.
Constants¶
- BrickletGPS.DEVICE_IDENTIFIER¶
This constant is used to identify a GPS Bricklet.
The
GetIdentity()function and theIPConnection.EnumerateCallbackcallback of the IP Connection have adeviceIdentifierparameter to specify the Brick's or Bricklet's type.
- BrickletGPS.DEVICE_DISPLAY_NAME¶
This constant represents the human readable name of a GPS Bricklet.