- Einstieg
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- Voraussetzungen
- Installation
- Test eines Beispiels
- API Referenz und Beispiele
- IP Connection
- Bricks
- Bricks (Abgekündigt)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Abgekündigt)
- C/C++ (iOS)
- C/C++ für Mikrocontroller
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- C/C++
- ESP32 Firmware
- APT Repository
- Device Identifier
- Quelltexte und Bug Tracking
- Programmierschnittstelle
- Kits
- Embedded Boards
- Spezifikationen
C/C++ - Tilt Bricklet¶
Dies ist die Beschreibung der C/C++ API Bindings für das Tilt Bricklet. Allgemeine Informationen über die Funktionen und technischen Spezifikationen des Tilt Bricklet sind in dessen Hardware Beschreibung zusammengefasst.
Eine Installationanleitung für die C/C++ API Bindings ist Teil deren allgemeine Beschreibung.
Beispiele¶
Der folgende Beispielcode ist Public Domain (CC0 1.0).
Simple¶
1#include <stdio.h>
2
3#include "ip_connection.h"
4#include "bricklet_tilt.h"
5
6#define HOST "localhost"
7#define PORT 4223
8#define UID "XYZ" // Change XYZ to the UID of your Tilt Bricklet
9
10int main(void) {
11 // Create IP connection
12 IPConnection ipcon;
13 ipcon_create(&ipcon);
14
15 // Create device object
16 Tilt t;
17 tilt_create(&t, UID, &ipcon);
18
19 // Connect to brickd
20 if(ipcon_connect(&ipcon, HOST, PORT) < 0) {
21 fprintf(stderr, "Could not connect\n");
22 return 1;
23 }
24 // Don't use device before ipcon is connected
25
26 // Get current tilt state
27 uint8_t state;
28 if(tilt_get_tilt_state(&t, &state) < 0) {
29 fprintf(stderr, "Could not get tilt state, probably timeout\n");
30 return 1;
31 }
32
33 if(state == TILT_TILT_STATE_CLOSED) {
34 printf("Tilt State: Closed\n");
35 } else if(state == TILT_TILT_STATE_OPEN) {
36 printf("Tilt State: Open\n");
37 } else if(state == TILT_TILT_STATE_CLOSED_VIBRATING) {
38 printf("Tilt State: Closed Vibrating\n");
39 }
40
41 printf("Press key to exit\n");
42 getchar();
43 tilt_destroy(&t);
44 ipcon_destroy(&ipcon); // Calls ipcon_disconnect internally
45 return 0;
46}
Callback¶
1#include <stdio.h>
2
3#include "ip_connection.h"
4#include "bricklet_tilt.h"
5
6#define HOST "localhost"
7#define PORT 4223
8#define UID "XYZ" // Change XYZ to the UID of your Tilt Bricklet
9
10// Callback function for tilt state callback
11void cb_tilt_state(uint8_t state, void *user_data) {
12 (void)user_data; // avoid unused parameter warning
13
14 if(state == TILT_TILT_STATE_CLOSED) {
15 printf("Tilt State: Closed\n");
16 } else if(state == TILT_TILT_STATE_OPEN) {
17 printf("Tilt State: Open\n");
18 } else if(state == TILT_TILT_STATE_CLOSED_VIBRATING) {
19 printf("Tilt State: Closed Vibrating\n");
20 }
21}
22
23int main(void) {
24 // Create IP connection
25 IPConnection ipcon;
26 ipcon_create(&ipcon);
27
28 // Create device object
29 Tilt t;
30 tilt_create(&t, UID, &ipcon);
31
32 // Connect to brickd
33 if(ipcon_connect(&ipcon, HOST, PORT) < 0) {
34 fprintf(stderr, "Could not connect\n");
35 return 1;
36 }
37 // Don't use device before ipcon is connected
38
39 // Enable tilt state callback
40 tilt_enable_tilt_state_callback(&t);
41
42 // Register tilt state callback to function cb_tilt_state
43 tilt_register_callback(&t,
44 TILT_CALLBACK_TILT_STATE,
45 (void (*)(void))cb_tilt_state,
46 NULL);
47
48 printf("Press key to exit\n");
49 getchar();
50 tilt_destroy(&t);
51 ipcon_destroy(&ipcon); // Calls ipcon_disconnect internally
52 return 0;
53}
API¶
Die meistens Funktionen der C/C++ Bindings geben einen Fehlercode (e_code)
zurück. Vom Gerät zurückgegebene Daten werden, wenn eine
Abfrage aufgerufen wurde, über Ausgabeparameter gehandhabt. Diese Parameter
sind mit dem ret_ Präfix gekennzeichnet.
Mögliche Fehlercodes sind:
E_OK = 0
E_TIMEOUT = -1
E_NO_STREAM_SOCKET = -2
E_HOSTNAME_INVALID = -3
E_NO_CONNECT = -4
E_NO_THREAD = -5
E_NOT_ADDED = -6 (seit C/C++ Bindings Version 2.0.0 nicht mehr verwendet)
E_ALREADY_CONNECTED = -7
E_NOT_CONNECTED = -8
E_INVALID_PARAMETER = -9
E_NOT_SUPPORTED = -10
E_UNKNOWN_ERROR_CODE = -11
E_STREAM_OUT_OF_SYNC = -12
E_INVALID_UID = -13
E_NON_ASCII_CHAR_IN_SECRET = -14
E_WRONG_DEVICE_TYPE = -15
E_DEVICE_REPLACED = -16
E_WRONG_RESPONSE_LENGTH = -17
wie in ip_connection.h definiert.
Alle folgend aufgelisteten Funktionen sind Thread-sicher.
Grundfunktionen¶
-
void tilt_create(Tilt *tilt, const char *uid, IPConnection *ipcon)¶
Parameter: - tilt – Typ: Tilt *
- uid – Typ: const char *
- ipcon – Typ: IPConnection *
Erzeugt ein Geräteobjekt
tiltmit der eindeutigen Geräte IDuidund fügt es der IP Connectionipconhinzu:Tilt tilt; tilt_create(&tilt, "YOUR_DEVICE_UID", &ipcon);
Dieses Geräteobjekt kann benutzt werden, nachdem die IP Connection verbunden.
-
void tilt_destroy(Tilt *tilt)¶
Parameter: - tilt – Typ: Tilt *
Entfernt das Geräteobjekt
tiltvon dessen IP Connection und zerstört es. Das Geräteobjekt kann hiernach nicht mehr verwendet werden.
-
int tilt_get_tilt_state(Tilt *tilt, uint8_t *ret_state)¶
Parameter: - tilt – Typ: Tilt *
Ausgabeparameter: - ret_state – Typ: uint8_t, Wertebereich: Siehe Konstanten
Rückgabe: - e_code – Typ: int
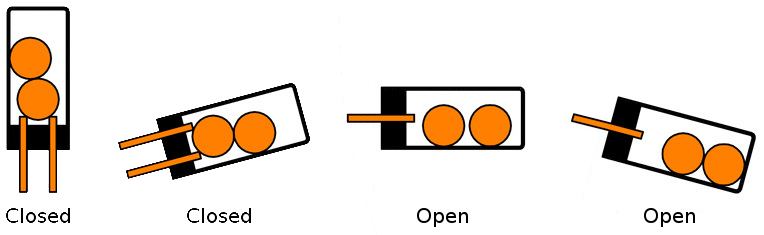
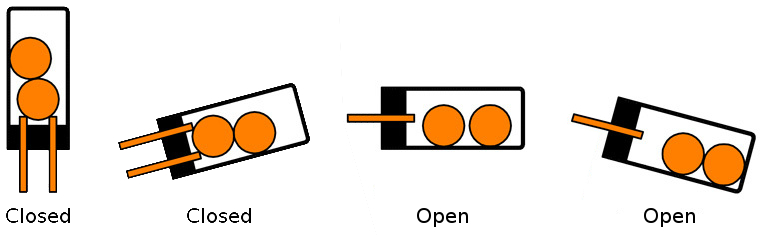
Gibt den aktuellen Tilt-Zustand zurück. Der Zustand kann folgende Werte annehmen:
0 = Closed: Der Ball im Neigungsschalter schließt den Stromkreis.
1 = Open: Der Ball im Neigungsschalter schließt den Stromkreis nicht.
2 = Closed Vibrating: Der Neigungsschalter ist in Bewegung (schnelle Änderungen zwischen open und close).
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für ret_state:
TILT_TILT_STATE_CLOSED = 0
TILT_TILT_STATE_OPEN = 1
TILT_TILT_STATE_CLOSED_VIBRATING = 2
Fortgeschrittene Funktionen¶
-
int tilt_get_identity(Tilt *tilt, char ret_uid[8], char ret_connected_uid[8], char *ret_position, uint8_t ret_hardware_version[3], uint8_t ret_firmware_version[3], uint16_t *ret_device_identifier)¶
Parameter: - tilt – Typ: Tilt *
Ausgabeparameter: - ret_uid – Typ: char[8]
- ret_connected_uid – Typ: char[8]
- ret_position – Typ: char, Wertebereich: ['a' bis 'h', 'z']
- ret_hardware_version – Typ: uint8_t[3]
- 0: major – Typ: uint8_t, Wertebereich: [0 bis 255]
- 1: minor – Typ: uint8_t, Wertebereich: [0 bis 255]
- 2: revision – Typ: uint8_t, Wertebereich: [0 bis 255]
- ret_firmware_version – Typ: uint8_t[3]
- 0: major – Typ: uint8_t, Wertebereich: [0 bis 255]
- 1: minor – Typ: uint8_t, Wertebereich: [0 bis 255]
- 2: revision – Typ: uint8_t, Wertebereich: [0 bis 255]
- ret_device_identifier – Typ: uint16_t, Wertebereich: [0 bis 216 - 1]
Rückgabe: - e_code – Typ: int
Gibt die UID, die UID zu der das Bricklet verbunden ist, die Position, die Hard- und Firmware Version sowie den Device Identifier zurück.
Die Position ist 'a', 'b', 'c', 'd', 'e', 'f', 'g' oder 'h' (Bricklet Anschluss). Ein Bricklet hinter einem Isolator Bricklet ist immer an Position 'z'.
Eine Liste der Device Identifier Werte ist hier zu finden. Es gibt auch eine Konstante für den Device Identifier dieses Bricklets.
Konfigurationsfunktionen für Callbacks¶
-
void tilt_register_callback(Tilt *tilt, int16_t callback_id, void (*function)(void), void *user_data)¶
Parameter: - tilt – Typ: Tilt *
- callback_id – Typ: int16_t
- function – Typ: void (*)(void)
- user_data – Typ: void *
Registriert die
functionfür die gegebenecallback_id. Dieuser_datawerden der Funktion als letztes Parameter mit übergeben.Die verfügbaren Callback IDs mit den zugehörigen Funktionssignaturen sind unten zu finden.
-
int tilt_enable_tilt_state_callback(Tilt *tilt)¶
Parameter: - tilt – Typ: Tilt *
Rückgabe: - e_code – Typ: int
Aktiviert den
TILT_CALLBACK_TILT_STATECallback.
-
int tilt_disable_tilt_state_callback(Tilt *tilt)¶
Parameter: - tilt – Typ: Tilt *
Rückgabe: - e_code – Typ: int
Deaktiviert den
TILT_CALLBACK_TILT_STATECallback.
-
int tilt_is_tilt_state_callback_enabled(Tilt *tilt, bool *ret_enabled)¶
Parameter: - tilt – Typ: Tilt *
Ausgabeparameter: - ret_enabled – Typ: bool, Standardwert: false
Rückgabe: - e_code – Typ: int
Gibt true zurück wenn der
TILT_CALLBACK_TILT_STATECallback aktiviert ist.
Callbacks¶
Callbacks können registriert werden um zeitkritische oder wiederkehrende Daten
vom Gerät zu erhalten. Die Registrierung kann mit der tilt_register_callback()
Funktion durchgeführt werden:
void my_callback(int value, void *user_data) { printf("Value: %d\n", value); } tilt_register_callback(&tilt, TILT_CALLBACK_EXAMPLE, (void (*)(void))my_callback, NULL);
Die verfügbaren Konstanten mit den zugehörigen Funktionssignaturen werden weiter unten beschrieben.
Bemerkung
Callbacks für wiederkehrende Ereignisse zu verwenden ist immer zu bevorzugen gegenüber der Verwendung von Abfragen. Es wird weniger USB-Bandbreite benutzt und die Latenz ist erheblich geringer, da es keine Paketumlaufzeit gibt.
-
TILT_CALLBACK_TILT_STATE¶
void callback(uint8_t state, void *user_data)
Callback-Parameter: - state – Typ: uint8_t, Wertebereich: Siehe Konstanten
- user_data – Typ: void *
Dieser Callback übergibt den aktuellen Tilt-Status. Der Callback wird aufgerufen wenn sich der Status ändert.
Siehe
tilt_get_tilt_state()für eine Beschreibung der Zustände.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für state:
TILT_TILT_STATE_CLOSED = 0
TILT_TILT_STATE_OPEN = 1
TILT_TILT_STATE_CLOSED_VIBRATING = 2
Virtuelle Funktionen¶
Virtuelle Funktionen kommunizieren nicht mit dem Gerät selbst, sie arbeiten nur auf dem API Bindings Objekt. Dadurch können sie auch aufgerufen werden, ohne das das dazugehörige IP Connection Objekt verbunden ist.
-
int tilt_get_api_version(Tilt *tilt, uint8_t ret_api_version[3])¶
Parameter: - tilt – Typ: Tilt *
Ausgabeparameter: - ret_api_version – Typ: uint8_t[3]
- 0: major – Typ: uint8_t, Wertebereich: [0 bis 255]
- 1: minor – Typ: uint8_t, Wertebereich: [0 bis 255]
- 2: revision – Typ: uint8_t, Wertebereich: [0 bis 255]
Rückgabe: - e_code – Typ: int
Gibt die Version der API Definition zurück, die diese API Bindings implementieren. Dies ist weder die Release-Version dieser API Bindings noch gibt es in irgendeiner Weise Auskunft über den oder das repräsentierte(n) Brick oder Bricklet.
-
int tilt_get_response_expected(Tilt *tilt, uint8_t function_id, bool *ret_response_expected)¶
Parameter: - tilt – Typ: Tilt *
- function_id – Typ: uint8_t, Wertebereich: Siehe Konstanten
Ausgabeparameter: - ret_response_expected – Typ: bool
Rückgabe: - e_code – Typ: int
Gibt das Response-Expected-Flag für die Funktion mit der angegebenen Funktions IDs zurück. Es ist true falls für die Funktion beim Aufruf eine Antwort erwartet wird, false andernfalls.
Für Getter-Funktionen ist diese Flag immer gesetzt und kann nicht entfernt werden, da diese Funktionen immer eine Antwort senden. Für Konfigurationsfunktionen für Callbacks ist es standardmäßig gesetzt, kann aber entfernt werden mittels
tilt_set_response_expected(). Für Setter-Funktionen ist es standardmäßig nicht gesetzt, kann aber gesetzt werden.Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für function_id:
TILT_FUNCTION_ENABLE_TILT_STATE_CALLBACK = 2
TILT_FUNCTION_DISABLE_TILT_STATE_CALLBACK = 3
-
int tilt_set_response_expected(Tilt *tilt, uint8_t function_id, bool response_expected)¶
Parameter: - tilt – Typ: Tilt *
- function_id – Typ: uint8_t, Wertebereich: Siehe Konstanten
- response_expected – Typ: bool
Rückgabe: - e_code – Typ: int
Ändert das Response-Expected-Flag für die Funktion mit der angegebenen Funktion IDs. Diese Flag kann nur für Setter-Funktionen (Standardwert: false) und Konfigurationsfunktionen für Callbacks (Standardwert: true) geändert werden. Für Getter-Funktionen ist das Flag immer gesetzt.
Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für function_id:
TILT_FUNCTION_ENABLE_TILT_STATE_CALLBACK = 2
TILT_FUNCTION_DISABLE_TILT_STATE_CALLBACK = 3
-
int tilt_set_response_expected_all(Tilt *tilt, bool response_expected)¶
Parameter: - tilt – Typ: Tilt *
- response_expected – Typ: bool
Rückgabe: - e_code – Typ: int
Ändert das Response-Expected-Flag für alle Setter-Funktionen und Konfigurationsfunktionen für Callbacks diese Gerätes.
Konstanten¶
-
TILT_DEVICE_IDENTIFIER¶
Diese Konstante wird verwendet um ein Tilt Bricklet zu identifizieren.
Die
tilt_get_identity()Funktion und derIPCON_CALLBACK_ENUMERATECallback der IP Connection haben eindevice_identifierParameter um den Typ des Bricks oder Bricklets anzugeben.
-
TILT_DEVICE_DISPLAY_NAME¶
Diese Konstante stellt den Anzeigenamen eines Tilt Bricklet dar.