- Einstieg
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ für Mikrocontroller
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Mathematica
- MATLAB/Octave
- Voraussetzungen
- Installation
- Test eines Beispiels
- Bekannte Probleme
- API Referenz und Beispiele
- IP Connection
- Bricks
- Bricks (Abgekündigt)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Abgekündigt)
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Quelltexte und Bug Tracking
- Programmierschnittstelle
- Kits
- Embedded Boards
- Spezifikationen
MATLAB/Octave - Accelerometer Bricklet 2.0¶
Dies ist die Beschreibung der MATLAB/Octave API Bindings für das Accelerometer Bricklet 2.0. Allgemeine Informationen über die Funktionen und technischen Spezifikationen des Accelerometer Bricklet 2.0 sind in dessen Hardware Beschreibung zusammengefasst.
Eine Installationanleitung für die MATLAB/Octave API Bindings ist Teil deren allgemeine Beschreibung.
Beispiele¶
Der folgende Beispielcode ist Public Domain (CC0 1.0).
Simple (MATLAB)¶
Download (matlab_example_simple.m)
1function matlab_example_simple()
2 import com.tinkerforge.IPConnection;
3 import com.tinkerforge.BrickletAccelerometerV2;
4
5 HOST = 'localhost';
6 PORT = 4223;
7 UID = 'XYZ'; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
8
9 ipcon = IPConnection(); % Create IP connection
10 a = handle(BrickletAccelerometerV2(UID, ipcon), 'CallbackProperties'); % Create device object
11
12 ipcon.connect(HOST, PORT); % Connect to brickd
13 % Don't use device before ipcon is connected
14
15 % Get current acceleration
16 acceleration = a.getAcceleration();
17
18 fprintf('Acceleration [X]: %g g\n', acceleration.x/10000.0);
19 fprintf('Acceleration [Y]: %g g\n', acceleration.y/10000.0);
20 fprintf('Acceleration [Z]: %g g\n', acceleration.z/10000.0);
21
22 input('Press key to exit\n', 's');
23 ipcon.disconnect();
24end
Callback (MATLAB)¶
Download (matlab_example_callback.m)
1function matlab_example_callback()
2 import com.tinkerforge.IPConnection;
3 import com.tinkerforge.BrickletAccelerometerV2;
4
5 HOST = 'localhost';
6 PORT = 4223;
7 UID = 'XYZ'; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
8
9 ipcon = IPConnection(); % Create IP connection
10 a = handle(BrickletAccelerometerV2(UID, ipcon), 'CallbackProperties'); % Create device object
11
12 ipcon.connect(HOST, PORT); % Connect to brickd
13 % Don't use device before ipcon is connected
14
15 % Register acceleration callback to function cb_acceleration
16 set(a, 'AccelerationCallback', @(h, e) cb_acceleration(e));
17
18 % Set period for acceleration callback to 1s (1000ms)
19 a.setAccelerationCallbackConfiguration(1000, false);
20
21 input('Press key to exit\n', 's');
22 ipcon.disconnect();
23end
24
25% Callback function for acceleration callback
26function cb_acceleration(e)
27 fprintf('Acceleration [X]: %g g\n', e.x/10000.0);
28 fprintf('Acceleration [Y]: %g g\n', e.y/10000.0);
29 fprintf('Acceleration [Z]: %g g\n', e.z/10000.0);
30 fprintf('\n');
31end
Pitch Roll Callback (MATLAB)¶
Download (matlab_example_pitch_roll_callback.m)
1function matlab_example_pitch_roll_callback()
2 import com.tinkerforge.IPConnection;
3 import com.tinkerforge.BrickletAccelerometerV2;
4
5 HOST = 'localhost';
6 PORT = 4223;
7 UID = 'XYZ'; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
8
9 ipcon = IPConnection(); % Create IP connection
10 a = handle(BrickletAccelerometerV2(UID, ipcon), 'CallbackProperties'); % Create device object
11
12 ipcon.connect(HOST, PORT); % Connect to brickd
13 % Don't use device before ipcon is connected
14
15 % Register acceleration callback to function cb_acceleration
16 set(a, 'AccelerationCallback', @(h, e) cb_acceleration(e));
17
18 % Set period for acceleration callback to 100ms
19 a.setAccelerationCallbackConfiguration(100, false);
20
21 input('Press key to exit\n', 's');
22 ipcon.disconnect();
23end
24
25% Callback function for acceleration callback
26function cb_acceleration(e)
27 x = e.x/10000.0;
28 y = e.y/10000.0;
29 z = e.z/10000.0;
30 pitch = round(atan(x / sqrt(y * y + z * z)) * 180 / pi);
31 roll = round(atan(y / sqrt(x * x + z * z)) * 180 / pi);
32
33 fprintf('Pitch: %g°\n', pitch);
34 fprintf('Roll: %g°\n', roll);
35 fprintf('\n');
36end
Continuous Callback (MATLAB)¶
Download (matlab_example_continuous_callback.m)
1function matlab_example_continuous_callback()
2 import com.tinkerforge.IPConnection;
3 import com.tinkerforge.BrickletAccelerometerV2;
4
5 HOST = 'localhost';
6 PORT = 4223;
7 UID = 'XYZ'; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
8
9 ipcon = IPConnection(); % Create IP connection
10 a = handle(BrickletAccelerometerV2(UID, ipcon), 'CallbackProperties'); % Create device object
11
12 ipcon.connect(HOST, PORT); % Connect to brickd
13 % Don't use device before ipcon is connected
14
15 % Register 16-bit continuous acceleration callback to function cb_continuous_acceleration
16 set(a, 'ContinuousAcceleration16BitCallback', @(h, e) cb_continuous_acceleration(e));
17
18 % Configure to get X, Y and Z axis continuous acceleration with 16-bit resolution
19 a.setContinuousAccelerationConfiguration(true, true, true, BrickletAccelerometerV2.RESOLUTION_16BIT);
20
21 input('Press key to exit\n', 's');
22 ipcon.disconnect();
23end
24
25% Callback function for continuous acceleration callback
26function cb_continuous_acceleration(e)
27 data_all = [];
28 data_axis = [];
29
30 for i = 1:length(e.acceleration)
31 if mod(i, 3) ~= 0
32 data_axis = [data_axis double(e.acceleration(i)) / 10000.0];
33 else
34 data_axis = [data_axis double(e.acceleration(i)) / 10000.0];
35 data_all = [data_all; data_axis];
36 data_axis = [];
37 end
38 end
39
40 for i = 1:length(data_all)
41 data_axis = data_all(i,:);
42
43 for j = 1:length(data_axis)
44 if j == 1
45 fprintf('Acceleration [X]: %g g\n', data_axis(j));
46 elseif j == 2
47 fprintf('Acceleration [Y]: %g g\n', data_axis(j));
48 else
49 fprintf('Acceleration [Z]: %g g\n\n', data_axis(j));
50 end
51 end
52 end
53
54 fprintf('\n');
55end
Simple (Octave)¶
Download (octave_example_simple.m)
1function octave_example_simple()
2 more off;
3
4 HOST = "localhost";
5 PORT = 4223;
6 UID = "XYZ"; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
7
8 ipcon = javaObject("com.tinkerforge.IPConnection"); % Create IP connection
9 a = javaObject("com.tinkerforge.BrickletAccelerometerV2", UID, ipcon); % Create device object
10
11 ipcon.connect(HOST, PORT); % Connect to brickd
12 % Don't use device before ipcon is connected
13
14 % Get current acceleration
15 acceleration = a.getAcceleration();
16
17 fprintf("Acceleration [X]: %g g\n", acceleration.x/10000.0);
18 fprintf("Acceleration [Y]: %g g\n", acceleration.y/10000.0);
19 fprintf("Acceleration [Z]: %g g\n", acceleration.z/10000.0);
20
21 input("Press key to exit\n", "s");
22 ipcon.disconnect();
23end
Callback (Octave)¶
Download (octave_example_callback.m)
1function octave_example_callback()
2 more off;
3
4 HOST = "localhost";
5 PORT = 4223;
6 UID = "XYZ"; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
7
8 ipcon = javaObject("com.tinkerforge.IPConnection"); % Create IP connection
9 a = javaObject("com.tinkerforge.BrickletAccelerometerV2", UID, ipcon); % Create device object
10
11 ipcon.connect(HOST, PORT); % Connect to brickd
12 % Don't use device before ipcon is connected
13
14 % Register acceleration callback to function cb_acceleration
15 a.addAccelerationCallback(@cb_acceleration);
16
17 % Set period for acceleration callback to 1s (1000ms)
18 a.setAccelerationCallbackConfiguration(1000, false);
19
20 input("Press key to exit\n", "s");
21 ipcon.disconnect();
22end
23
24% Callback function for acceleration callback
25function cb_acceleration(e)
26 fprintf("Acceleration [X]: %g g\n", e.x/10000.0);
27 fprintf("Acceleration [Y]: %g g\n", e.y/10000.0);
28 fprintf("Acceleration [Z]: %g g\n", e.z/10000.0);
29 fprintf("\n");
30end
Pitch Roll Callback (Octave)¶
Download (octave_example_pitch_roll_callback.m)
1function octave_example_pitch_roll_callback()
2 more off;
3
4 HOST = "localhost";
5 PORT = 4223;
6 UID = "XYZ"; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
7
8 ipcon = javaObject("com.tinkerforge.IPConnection"); % Create IP connection
9 a = javaObject("com.tinkerforge.BrickletAccelerometerV2", UID, ipcon); % Create device object
10
11 ipcon.connect(HOST, PORT); % Connect to brickd
12 % Don't use device before ipcon is connected
13
14 % Register acceleration callback to function cb_acceleration
15 a.addAccelerationCallback(@cb_acceleration);
16
17 % Set period for acceleration callback to 100ms
18 a.setAccelerationCallbackConfiguration(100, false);
19
20 input("Press key to exit\n", "s");
21 ipcon.disconnect();
22end
23
24% Callback function for acceleration callback
25function cb_acceleration(e)
26 x = e.x/10000.0;
27 y = e.y/10000.0;
28 z = e.z/10000.0;
29 pitch = round(atan(x / sqrt(y * y + z * z)) * 180 / pi);
30 roll = round(atan(y / sqrt(x * x + z * z)) * 180 / pi);
31
32 fprintf("Pitch: %g°\n", pitch);
33 fprintf("Roll: %g°\n", roll);
34 fprintf("\n");
35end
Continuous Callback (Octave)¶
Download (octave_example_continuous_callback.m)
1function octave_example_continuous_callback()
2 more off;
3
4 HOST = "localhost";
5 PORT = 4223;
6 UID = "XYZ"; % Change XYZ to the UID of your Accelerometer Bricklet 2.0
7
8 ipcon = javaObject("com.tinkerforge.IPConnection"); % Create IP connection
9 a = javaObject("com.tinkerforge.BrickletAccelerometerV2", UID, ipcon); % Create device object
10
11 ipcon.connect(HOST, PORT); % Connect to brickd
12 % Don't use device before ipcon is connected
13
14 % Register 16-bit continuous acceleration callback to function cb_continuous_acceleration
15 a.addContinuousAcceleration16BitCallback(@cb_continuous_acceleration);
16
17 % Configure to get X, Y and Z axis continuous acceleration with 16-bit resolution
18 a.setContinuousAccelerationConfiguration(true, true, true, a.RESOLUTION_16BIT);
19
20 input("Press key to exit\n", "s");
21 ipcon.disconnect();
22end
23
24% Callback function for continuous acceleration callback
25function cb_continuous_acceleration(e)
26 data_all = [];
27 data_axis = [];
28 acceleration = [e.acceleration];
29
30 for i = 1:length(e.acceleration)
31 if mod(i, 3) ~= 0
32 data_axis = [data_axis double(acceleration(i)) / 10000.0];
33 else
34 data_axis = [data_axis double(acceleration(i)) / 10000.0];
35 data_all = [data_all; data_axis];
36 data_axis = [];
37 end
38 end
39
40 for i = 1:length(data_all)
41 data_axis = data_all(i,:);
42
43 for j = 1:length(data_axis)
44 if j == 1
45 fprintf("Acceleration [X]: %g g\n", data_axis(j));
46 elseif j == 2
47 fprintf("Acceleration [Y]: %g g\n", data_axis(j));
48 else
49 fprintf("Acceleration [Z]: %g g\n\n", data_axis(j));
50 end
51 end
52 end
53
54 fprintf("\n");
55end
56
57octave_example_continuous_callback();
API¶
Prinzipiell kann jede Methode der MATLAB Bindings eine TimeoutException
werfen. Diese Exception wird
geworfen wenn das Gerät nicht antwortet. Wenn eine Kabelverbindung genutzt
wird, ist es unwahrscheinlich, dass die Exception geworfen wird (unter der
Annahme, dass das Gerät nicht abgesteckt wird). Bei einer drahtlosen Verbindung
können Zeitüberschreitungen auftreten, sobald die Entfernung zum Gerät zu
groß wird.
Neben der TimeoutException kann auch noch eine NotConnectedException
geworfen werden, wenn versucht wird mit einem Brick oder Bricklet zu
kommunizieren, aber die IP Connection nicht verbunden ist.
Da die MATLAB Bindings auf Java basieren und Java nicht mehrere Rückgabewerte unterstützt und eine Referenzrückgabe für elementare Type nicht möglich ist, werden kleine Klassen verwendet, die nur aus Member-Variablen bestehen. Die Member-Variablen des zurückgegebenen Objektes werden in der jeweiligen Methodenbeschreibung erläutert.
Das Package für alle Brick/Bricklet Bindings und die IP Connection ist
com.tinkerforge.*
Alle folgend aufgelisteten Methoden sind Thread-sicher.
Grundfunktionen¶
- class BrickletAccelerometerV2(String uid, IPConnection ipcon)¶
Parameter: - uid – Typ: String
- ipcon – Typ: IPConnection
Rückgabe: - accelerometerV2 – Typ: BrickletAccelerometerV2
Erzeugt ein Objekt mit der eindeutigen Geräte ID
uid.In MATLAB:
import com.tinkerforge.BrickletAccelerometerV2; accelerometerV2 = BrickletAccelerometerV2("YOUR_DEVICE_UID", ipcon);
In Octave:
accelerometerV2 = java_new("com.tinkerforge.BrickletAccelerometerV2", "YOUR_DEVICE_UID", ipcon);
Dieses Objekt kann benutzt werden, nachdem die IP Connection verbunden ist.
- BrickletAccelerometerV2.Acceleration BrickletAccelerometerV2.getAcceleration()¶
Rückgabeobjekt: - x – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
- y – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
- z – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
Gibt die Beschleunigung in X-, Y- und Z-Richtung zurück. Die Werte haben die Einheit gₙ/10000 (1gₙ = 9,80665m/s²). Der Wertebereich wird mit
setConfiguration()konfiguriert.Wenn die Beschleunigungswerte periodisch abgefragt werden sollen, wird empfohlen den
AccelerationCallbackCallback zu nutzen und die Periode mitsetAccelerationCallbackConfiguration()vorzugeben.
- void BrickletAccelerometerV2.setConfiguration(int dataRate, int fullScale)¶
Parameter: - dataRate – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 7
- fullScale – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Konfiguriert die Datenrate und den Wertebereich. Mögliche Konfigurationswerte sind:
Datenrate zwischen 0,781Hz und 25600Hz.
Wertebereich von ±2g bis zu ±8g.
Eine Verringerung der Datenrate oder des Wertebereichs verringert auch automatisch das Rauschen auf den Daten.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für dataRate:
BrickletAccelerometerV2.DATA_RATE_0_781HZ = 0
BrickletAccelerometerV2.DATA_RATE_1_563HZ = 1
BrickletAccelerometerV2.DATA_RATE_3_125HZ = 2
BrickletAccelerometerV2.DATA_RATE_6_2512HZ = 3
BrickletAccelerometerV2.DATA_RATE_12_5HZ = 4
BrickletAccelerometerV2.DATA_RATE_25HZ = 5
BrickletAccelerometerV2.DATA_RATE_50HZ = 6
BrickletAccelerometerV2.DATA_RATE_100HZ = 7
BrickletAccelerometerV2.DATA_RATE_200HZ = 8
BrickletAccelerometerV2.DATA_RATE_400HZ = 9
BrickletAccelerometerV2.DATA_RATE_800HZ = 10
BrickletAccelerometerV2.DATA_RATE_1600HZ = 11
BrickletAccelerometerV2.DATA_RATE_3200HZ = 12
BrickletAccelerometerV2.DATA_RATE_6400HZ = 13
BrickletAccelerometerV2.DATA_RATE_12800HZ = 14
BrickletAccelerometerV2.DATA_RATE_25600HZ = 15
Für fullScale:
BrickletAccelerometerV2.FULL_SCALE_2G = 0
BrickletAccelerometerV2.FULL_SCALE_4G = 1
BrickletAccelerometerV2.FULL_SCALE_8G = 2
- BrickletAccelerometerV2.Configuration BrickletAccelerometerV2.getConfiguration()¶
Rückgabeobjekt: - dataRate – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 7
- fullScale – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Gibt die Konfiguration zurück, wie von
setConfiguration()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für dataRate:
BrickletAccelerometerV2.DATA_RATE_0_781HZ = 0
BrickletAccelerometerV2.DATA_RATE_1_563HZ = 1
BrickletAccelerometerV2.DATA_RATE_3_125HZ = 2
BrickletAccelerometerV2.DATA_RATE_6_2512HZ = 3
BrickletAccelerometerV2.DATA_RATE_12_5HZ = 4
BrickletAccelerometerV2.DATA_RATE_25HZ = 5
BrickletAccelerometerV2.DATA_RATE_50HZ = 6
BrickletAccelerometerV2.DATA_RATE_100HZ = 7
BrickletAccelerometerV2.DATA_RATE_200HZ = 8
BrickletAccelerometerV2.DATA_RATE_400HZ = 9
BrickletAccelerometerV2.DATA_RATE_800HZ = 10
BrickletAccelerometerV2.DATA_RATE_1600HZ = 11
BrickletAccelerometerV2.DATA_RATE_3200HZ = 12
BrickletAccelerometerV2.DATA_RATE_6400HZ = 13
BrickletAccelerometerV2.DATA_RATE_12800HZ = 14
BrickletAccelerometerV2.DATA_RATE_25600HZ = 15
Für fullScale:
BrickletAccelerometerV2.FULL_SCALE_2G = 0
BrickletAccelerometerV2.FULL_SCALE_4G = 1
BrickletAccelerometerV2.FULL_SCALE_8G = 2
- void BrickletAccelerometerV2.setInfoLEDConfig(int config)¶
Parameter: - config – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Konfiguriert die Info-LED (als "Force" auf dem Bricklet gekennzeichnet). Die LED kann ausgeschaltet, eingeschaltet oder im Herzschlagmodus betrieben werden.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für config:
BrickletAccelerometerV2.INFO_LED_CONFIG_OFF = 0
BrickletAccelerometerV2.INFO_LED_CONFIG_ON = 1
BrickletAccelerometerV2.INFO_LED_CONFIG_SHOW_HEARTBEAT = 2
- int BrickletAccelerometerV2.getInfoLEDConfig()¶
Rückgabe: - config – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Gibt die LED-Konfiguration zurück, wie von
setInfoLEDConfig()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für config:
BrickletAccelerometerV2.INFO_LED_CONFIG_OFF = 0
BrickletAccelerometerV2.INFO_LED_CONFIG_ON = 1
BrickletAccelerometerV2.INFO_LED_CONFIG_SHOW_HEARTBEAT = 2
Fortgeschrittene Funktionen¶
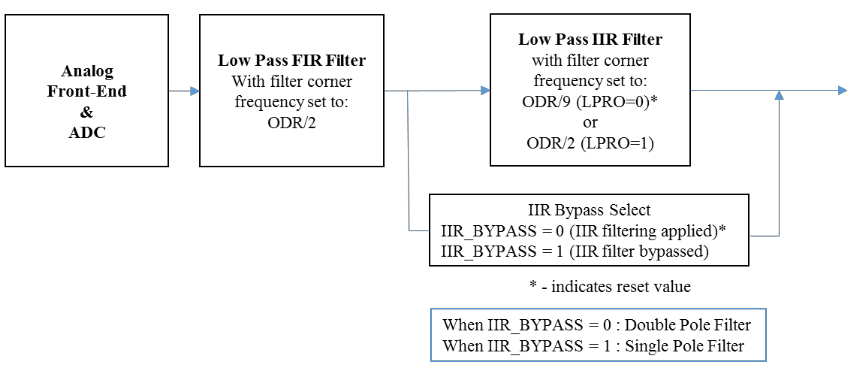
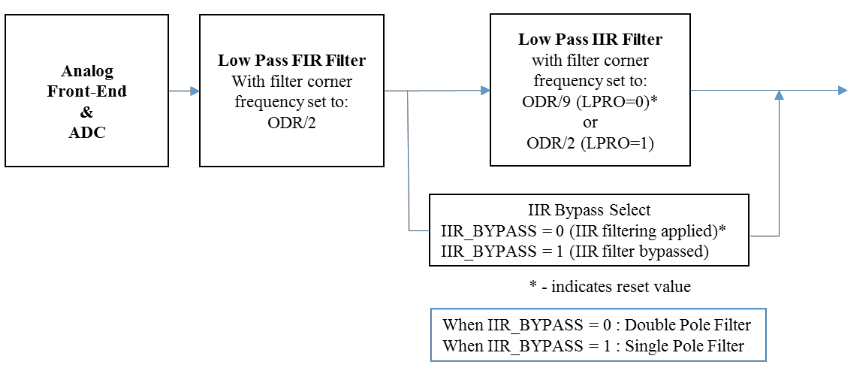
- void BrickletAccelerometerV2.setFilterConfiguration(int iirBypass, int lowPassFilter)¶
Parameter: - iirBypass – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
- lowPassFilter – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Konfiguriert den IIR Bypass Filter Modus und die Grenzfrequenz des Tiefpassfilters.
Der Filter kann angewendet oder umgangen werden und die Frequenz kann die halbe oder ein Neuntel der Ausgabe-Datenrate sein.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für iirBypass:
BrickletAccelerometerV2.IIR_BYPASS_APPLIED = 0
BrickletAccelerometerV2.IIR_BYPASS_BYPASSED = 1
Für lowPassFilter:
BrickletAccelerometerV2.LOW_PASS_FILTER_NINTH = 0
BrickletAccelerometerV2.LOW_PASS_FILTER_HALF = 1
Neu in Version 2.0.2$nbsp;(Plugin).
- BrickletAccelerometerV2.FilterConfiguration BrickletAccelerometerV2.getFilterConfiguration()¶
Rückgabeobjekt: - iirBypass – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
- lowPassFilter – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Gibt die Konfiguration zurück, wie von
setFilterConfiguration()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für iirBypass:
BrickletAccelerometerV2.IIR_BYPASS_APPLIED = 0
BrickletAccelerometerV2.IIR_BYPASS_BYPASSED = 1
Für lowPassFilter:
BrickletAccelerometerV2.LOW_PASS_FILTER_NINTH = 0
BrickletAccelerometerV2.LOW_PASS_FILTER_HALF = 1
Neu in Version 2.0.2$nbsp;(Plugin).
- BrickletAccelerometerV2.SPITFPErrorCount BrickletAccelerometerV2.getSPITFPErrorCount()¶
Rückgabeobjekt: - errorCountAckChecksum – Typ: long, Wertebereich: [0 bis 232 - 1]
- errorCountMessageChecksum – Typ: long, Wertebereich: [0 bis 232 - 1]
- errorCountFrame – Typ: long, Wertebereich: [0 bis 232 - 1]
- errorCountOverflow – Typ: long, Wertebereich: [0 bis 232 - 1]
Gibt die Anzahl der Fehler die während der Kommunikation zwischen Brick und Bricklet aufgetreten sind zurück.
Die Fehler sind aufgeteilt in
ACK-Checksummen Fehler,
Message-Checksummen Fehler,
Framing Fehler und
Overflow Fehler.
Die Fehlerzähler sind für Fehler die auf der Seite des Bricklets auftreten. Jedes Brick hat eine ähnliche Funktion welche die Fehler auf Brickseite ausgibt.
- void BrickletAccelerometerV2.setStatusLEDConfig(int config)¶
Parameter: - config – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 3
Setzt die Konfiguration der Status-LED. Standardmäßig zeigt die LED die Kommunikationsdatenmenge an. Sie blinkt einmal auf pro 10 empfangenen Datenpaketen zwischen Brick und Bricklet.
Die LED kann auch permanent an/aus gestellt werden oder einen Herzschlag anzeigen.
Wenn das Bricklet sich im Bootlodermodus befindet ist die LED aus.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für config:
BrickletAccelerometerV2.STATUS_LED_CONFIG_OFF = 0
BrickletAccelerometerV2.STATUS_LED_CONFIG_ON = 1
BrickletAccelerometerV2.STATUS_LED_CONFIG_SHOW_HEARTBEAT = 2
BrickletAccelerometerV2.STATUS_LED_CONFIG_SHOW_STATUS = 3
- int BrickletAccelerometerV2.getStatusLEDConfig()¶
Rückgabe: - config – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 3
Gibt die Konfiguration zurück, wie von
setStatusLEDConfig()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für config:
BrickletAccelerometerV2.STATUS_LED_CONFIG_OFF = 0
BrickletAccelerometerV2.STATUS_LED_CONFIG_ON = 1
BrickletAccelerometerV2.STATUS_LED_CONFIG_SHOW_HEARTBEAT = 2
BrickletAccelerometerV2.STATUS_LED_CONFIG_SHOW_STATUS = 3
- int BrickletAccelerometerV2.getChipTemperature()¶
Rückgabe: - temperature – Typ: int, Einheit: 1 °C, Wertebereich: [-215 bis 215 - 1]
Gibt die Temperatur, gemessen im Mikrocontroller, aus. Der Rückgabewert ist nicht die Umgebungstemperatur.
Die Temperatur ist lediglich proportional zur echten Temperatur und hat eine hohe Ungenauigkeit. Daher beschränkt sich der praktische Nutzen auf die Indikation von Temperaturveränderungen.
- void BrickletAccelerometerV2.reset()¶
Ein Aufruf dieser Funktion setzt das Bricklet zurück. Nach einem Neustart sind alle Konfiguration verloren.
Nach dem Zurücksetzen ist es notwendig neue Objekte zu erzeugen, Funktionsaufrufe auf bestehenden führen zu undefiniertem Verhalten.
- BrickletAccelerometerV2.Identity BrickletAccelerometerV2.getIdentity()¶
Rückgabeobjekt: - uid – Typ: String, Länge: bis zu 8
- connectedUid – Typ: String, Länge: bis zu 8
- position – Typ: char, Wertebereich: ['a' bis 'h', 'z']
- hardwareVersion – Typ: short[], Länge: 3
- 1: major – Typ: short, Wertebereich: [0 bis 255]
- 2: minor – Typ: short, Wertebereich: [0 bis 255]
- 3: revision – Typ: short, Wertebereich: [0 bis 255]
- firmwareVersion – Typ: short[], Länge: 3
- 1: major – Typ: short, Wertebereich: [0 bis 255]
- 2: minor – Typ: short, Wertebereich: [0 bis 255]
- 3: revision – Typ: short, Wertebereich: [0 bis 255]
- deviceIdentifier – Typ: int, Wertebereich: [0 bis 216 - 1]
Gibt die UID, die UID zu der das Bricklet verbunden ist, die Position, die Hard- und Firmware Version sowie den Device Identifier zurück.
Die Position ist 'a', 'b', 'c', 'd', 'e', 'f', 'g' oder 'h' (Bricklet Anschluss). Ein Bricklet hinter einem Isolator Bricklet ist immer an Position 'z'.
Eine Liste der Device Identifier Werte ist hier zu finden. Es gibt auch eine Konstante für den Device Identifier dieses Bricklets.
Konfigurationsfunktionen für Callbacks¶
- void BrickletAccelerometerV2.setAccelerationCallbackConfiguration(long period, boolean valueHasToChange)¶
Parameter: - period – Typ: long, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
- valueHasToChange – Typ: boolean, Standardwert: false
Die Periode ist die Periode mit der der
AccelerationCallbackCallback ausgelöst wird. Ein Wert von 0 schaltet den Callback ab.Wenn der value has to change-Parameter auf True gesetzt wird, wird der Callback nur ausgelöst, wenn der Wert sich im Vergleich zum letzten mal geändert hat. Ändert der Wert sich nicht innerhalb der Periode, so wird der Callback sofort ausgelöst, wenn der Wert sich das nächste mal ändert.
Wird der Parameter auf False gesetzt, so wird der Callback dauerhaft mit der festen Periode ausgelöst unabhängig von den Änderungen des Werts.
Wenn dieser Callback aktiviert ist, werden der
ContinuousAcceleration16BitCallbackCallback undContinuousAcceleration8BitCallbackCallback automatisch deaktiviert.
- BrickletAccelerometerV2.AccelerationCallbackConfiguration BrickletAccelerometerV2.getAccelerationCallbackConfiguration()¶
Rückgabeobjekt: - period – Typ: long, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
- valueHasToChange – Typ: boolean, Standardwert: false
Gibt die Callback-Konfiguration zurück, wie mittels
setAccelerationCallbackConfiguration()gesetzt.
- void BrickletAccelerometerV2.setContinuousAccelerationConfiguration(boolean enableX, boolean enableY, boolean enableZ, int resolution)¶
Parameter: - enableX – Typ: boolean, Standardwert: false
- enableY – Typ: boolean, Standardwert: false
- enableZ – Typ: boolean, Standardwert: false
- resolution – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Um einen hohen Durchsatz an Beschleunigungswerten zu erreichen (> 1000Hz) müssen die
ContinuousAcceleration16BitCallbackoderContinuousAcceleration8BitCallbackCallbacks genutzt werden.Die Callbacks können für die Achsen (x, y, z) individuell aktiviert werden. Des weiteren kann eine Auflösung von 8-Bit oder 16-Bit ausgewählt werden.
Wenn mindestens eine Achse aktiviert ist mit 8-Bit Auflösung, wird der
ContinuousAcceleration8BitCallback-Callback aktiviert. Wenn mindestens eine Achse aktiviert ist mit 16-Bit Auflösung, wird derContinuousAcceleration16BitCallback-Callback aktiviert.Die zurückgegebenen Werte sind Rohwerte des AD-Wandlers. Wenn die Daten mit einem FFT genutzt werden sollen um Vorkomnisse from Frequenzen zu bestimmen empfehlen wir die Rohwerte direkt zu nutzen. Die Rohwerte beinhalten das Rauschen des AD-Wandlers, in diesem Rauschen können allerdings Frequenzinformation enthalten sein die für einen FFT relevant seien können.
Andernfalls können die folgenden Formeln benutzt werden um die Daten wieder in der Einheit gₙ/10000 (gleiche Einheit wie von
getAcceleration()zurückgegeben) umzuwandeln. Die Formeln hängen ab von der eingestelleten Auflösung (8/16-Bit) und dem eingestellten Wertebereich (siehesetConfiguration()):16-Bit, Wertebereich 2g: Beschleunigung = Rohwert * 625 / 1024
16-Bit, Wertebereich 4g: Beschleunigung = Rohwert * 1250 / 1024
16-Bit, Wertebereich 8g: Beschleunigung = Rohwert * 2500 / 1024
Bei einer Auflösung von 8-Bit werden nur die 8 höchstwertigen Bits übertragen, daher sehen die Formeln wie folgt aus:
8-Bit, Wertebereich 2g: Beschleunigung = Rohwert * 256 * 625 / 1024
8-Bit, Wertebereich 4g: Beschleunigung = Rohwert * 256 * 1250 / 1024
8-Bit, Wertebereich 8g: Beschleunigung = Rohwert * 256 * 2500 / 1024
Wenn keine Achse aktiviert is, sind beide Callbacks deaktiviert. Wenn einer der "Continuous Callbacks" genutzt wird, wird der
AccelerationCallback-Callback automatisch deaktiviert.Der maximale Durchsatz hängt von der Konfiguration ab:
Anzahl aktiviert Achsen
Durchsatz 8-Bit
Durchsatz 16-Bit
1
25600Hz
25600Hz
2
25600Hz
15000Hz
3
20000Hz
10000Hz
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für resolution:
BrickletAccelerometerV2.RESOLUTION_8BIT = 0
BrickletAccelerometerV2.RESOLUTION_16BIT = 1
- BrickletAccelerometerV2.ContinuousAccelerationConfiguration BrickletAccelerometerV2.getContinuousAccelerationConfiguration()¶
Rückgabeobjekt: - enableX – Typ: boolean, Standardwert: false
- enableY – Typ: boolean, Standardwert: false
- enableZ – Typ: boolean, Standardwert: false
- resolution – Typ: int, Wertebereich: Siehe Konstanten, Standardwert: 0
Gibt die Konfiguration für kontinuierliche Beschleunigungswerte zurück, wie mittels
setContinuousAccelerationConfiguration()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für resolution:
BrickletAccelerometerV2.RESOLUTION_8BIT = 0
BrickletAccelerometerV2.RESOLUTION_16BIT = 1
Callbacks¶
Callbacks können registriert werden um zeitkritische oder wiederkehrende Daten vom Gerät zu erhalten. Die Registrierung wird mit MATLABs "set" Funktion durchgeführt. Die Parameter sind ein Gerätobjekt, der Callback-Name und die Callback-Funktion. Hier ein Beispiel in MATLAB:
function my_callback(e)
fprintf('Parameter: %s\n', e.param);
end
set(device, 'ExampleCallback', @(h, e) my_callback(e));
Die Octave Java Unterstützung unterscheidet sich hier von MATLAB, die "set" Funktion kann hier nicht verwendet werden. Die Registrierung wird in Octave mit "add*Callback" Funktionen des Gerätobjekts durchgeführt. Hier ein Beispiel in Octave:
function my_callback(e)
fprintf("Parameter: %s\n", e.param);
end
device.addExampleCallback(@my_callback);
Es ist möglich mehrere Callback-Funktion hinzuzufügen und auch mit einem korrespondierenden "remove*Callback" wieder zu entfernen.
Die Parameter des Callbacks werden der Callback-Funktion als Felder der
Struktur e übergeben. Diese ist von der java.util.EventObject Klasse
abgeleitete. Die verfügbaren Callback-Namen mit den entsprechenden
Strukturfeldern werden unterhalb beschrieben.
Bemerkung
Callbacks für wiederkehrende Ereignisse zu verwenden ist immer zu bevorzugen gegenüber der Verwendung von Abfragen. Es wird weniger USB-Bandbreite benutzt und die Latenz ist erheblich geringer, da es keine Paketumlaufzeit gibt.
- callback BrickletAccelerometerV2.AccelerationCallback¶
Event-Objekt: - x – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
- y – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
- z – Typ: int, Einheit: 1/10000 gₙ, Wertebereich: ?
Dieser Callback wird periodisch ausgelöst abhängig von der mittels
setAccelerationCallbackConfiguration()gesetzten Konfiguration.Die Parameter sind die gleichen wie
getAcceleration().In MATLAB kann die
set()Function verwendet werden um diesem Callback eine Callback-Function zuzuweisen.In Octave kann diesem Callback mit
addAccelerationCallback()eine Callback-Function hinzugefügt werden. Eine hinzugefügter Callback-Function kann mitremoveAccelerationCallback()wieder entfernt werden.
- callback BrickletAccelerometerV2.ContinuousAcceleration16BitCallback¶
Event-Objekt: - acceleration – Typ: int[], Länge: 30, Einheit: ? gₙ, Wertebereich: ?
Gibt 30 Beschleunigungswerte mit 16 bit Auflösung zurück. Die Datenrate kann mit der Funktion
setConfiguration()eingestellt werden und der Callback kann persetContinuousAccelerationConfiguration()aktiviert werden.Die zurückgegebenen Werte sind Rohwerte des AD-Wandlers. Wenn die Daten mit einem FFT genutzt werden sollen um Vorkomnisse from Frequenzen zu bestimmen empfehlen wir die Rohwerte direkt zu nutzen. Die Rohwerte beinhalten das Rauschen des AD-Wandlers, in diesem Rauschen können allerdings Frequenzinformation enthalten sein die für einen FFT relevant seien können.
Andernfalls können die folgenden Formeln benutzt werden um die Daten wieder in der Einheit gₙ/10000 (gleiche Einheit wie von
getAcceleration()zurückgegeben) umzuwandeln. Die Formeln hängen ab von dem eingestellten Wertebereich (siehesetConfiguration()):Wertebereich 2g: Beschleunigung = Rohwert * 625 / 1024
Wertebereich 4g: Beschleunigung = Rohwert * 1250 / 1024
Wertebereich 8g: Beschleunigung = Rohwert * 2500 / 1024
Die Daten sind in der Sequenz "x, y, z, x, y, z, ..." formatiert, abhängig von den aktivierten Achsen. Beispiele:
x, y, z aktiviert: "x, y, z, ..." 10x wiederholt
x, z aktiviert: "x, z, ..." 15x wiederholt
y aktiviert: "y, ..." 30x wiederholt
In MATLAB kann die
set()Function verwendet werden um diesem Callback eine Callback-Function zuzuweisen.In Octave kann diesem Callback mit
addContinuousAcceleration16BitCallback()eine Callback-Function hinzugefügt werden. Eine hinzugefügter Callback-Function kann mitremoveContinuousAcceleration16BitCallback()wieder entfernt werden.
- callback BrickletAccelerometerV2.ContinuousAcceleration8BitCallback¶
Event-Objekt: - acceleration – Typ: int[], Länge: 60, Einheit: ? gₙ, Wertebereich: ?
Gibt 60 Beschleunigungswerte mit 8 bit Auflösung zurück. Die Datenrate kann mit der Funktion
setConfiguration()eingestellt werden und der Callback kann persetContinuousAccelerationConfiguration()aktiviert werden.Die zurückgegebenen Werte sind Rohwerte des AD-Wandlers. Wenn die Daten mit einem FFT genutzt werden sollen um Vorkomnisse from Frequenzen zu bestimmen empfehlen wir die Rohwerte direkt zu nutzen. Die Rohwerte beinhalten das Rauschen des AD-Wandlers, in diesem Rauschen können allerdings Frequenzinformation enthalten sein die für einen FFT relevant seien können.
Andernfalls können die folgenden Formeln benutzt werden um die Daten wieder in der Einheit gₙ/10000 (gleiche Einheit wie von
getAcceleration()zurückgegeben) umzuwandeln. Die Formeln hängen ab von dem eingestellten Wertebereich (siehesetConfiguration()):Wertebereich 2g: Beschleunigung = Rohwert * 256 * 625 / 1024
Wertebereich 4g: Beschleunigung = Rohwert * 256 * 1250 / 1024
Wertebereich 8g: Beschleunigung = Rohwert * 256 * 2500 / 1024
Die Daten sind in der Sequenz "x, y, z, x, y, z, ..." formatiert, abhängig von den aktivierten Achsen. Beispiele:
x, y, z aktiviert: "x, y, z, ..." 20x wiederholt
x, z aktiviert: "x, z, ..." 30x wiederholt
y aktiviert: "y, ..." 60x wiederholt
In MATLAB kann die
set()Function verwendet werden um diesem Callback eine Callback-Function zuzuweisen.In Octave kann diesem Callback mit
addContinuousAcceleration8BitCallback()eine Callback-Function hinzugefügt werden. Eine hinzugefügter Callback-Function kann mitremoveContinuousAcceleration8BitCallback()wieder entfernt werden.
Virtuelle Funktionen¶
Virtuelle Funktionen kommunizieren nicht mit dem Gerät selbst, sie arbeiten nur auf dem API Bindings Objekt. Dadurch können sie auch aufgerufen werden, ohne das das dazugehörige IP Connection Objekt verbunden ist.
- short[] BrickletAccelerometerV2.getAPIVersion()¶
Rückgabeobjekt: - apiVersion – Typ: short[], Länge: 3
- 1: major – Typ: short, Wertebereich: [0 bis 255]
- 2: minor – Typ: short, Wertebereich: [0 bis 255]
- 3: revision – Typ: short, Wertebereich: [0 bis 255]
Gibt die Version der API Definition zurück, die diese API Bindings implementieren. Dies ist weder die Release-Version dieser API Bindings noch gibt es in irgendeiner Weise Auskunft über den oder das repräsentierte(n) Brick oder Bricklet.
- boolean BrickletAccelerometerV2.getResponseExpected(byte functionId)¶
Parameter: - functionId – Typ: byte, Wertebereich: Siehe Konstanten
Rückgabe: - responseExpected – Typ: boolean
Gibt das Response-Expected-Flag für die Funktion mit der angegebenen Funktions IDs zurück. Es ist true falls für die Funktion beim Aufruf eine Antwort erwartet wird, false andernfalls.
Für Getter-Funktionen ist diese Flag immer gesetzt und kann nicht entfernt werden, da diese Funktionen immer eine Antwort senden. Für Konfigurationsfunktionen für Callbacks ist es standardmäßig gesetzt, kann aber entfernt werden mittels
setResponseExpected(). Für Setter-Funktionen ist es standardmäßig nicht gesetzt, kann aber gesetzt werden.Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletAccelerometerV2.FUNCTION_SET_CONFIGURATION = 2
BrickletAccelerometerV2.FUNCTION_SET_ACCELERATION_CALLBACK_CONFIGURATION = 4
BrickletAccelerometerV2.FUNCTION_SET_INFO_LED_CONFIG = 6
BrickletAccelerometerV2.FUNCTION_SET_CONTINUOUS_ACCELERATION_CONFIGURATION = 9
BrickletAccelerometerV2.FUNCTION_SET_FILTER_CONFIGURATION = 13
BrickletAccelerometerV2.FUNCTION_SET_WRITE_FIRMWARE_POINTER = 237
BrickletAccelerometerV2.FUNCTION_SET_STATUS_LED_CONFIG = 239
BrickletAccelerometerV2.FUNCTION_RESET = 243
BrickletAccelerometerV2.FUNCTION_WRITE_UID = 248
- void BrickletAccelerometerV2.setResponseExpected(byte functionId, boolean responseExpected)¶
Parameter: - functionId – Typ: byte, Wertebereich: Siehe Konstanten
- responseExpected – Typ: boolean
Ändert das Response-Expected-Flag für die Funktion mit der angegebenen Funktion IDs. Diese Flag kann nur für Setter-Funktionen (Standardwert: false) und Konfigurationsfunktionen für Callbacks (Standardwert: true) geändert werden. Für Getter-Funktionen ist das Flag immer gesetzt.
Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletAccelerometerV2.FUNCTION_SET_CONFIGURATION = 2
BrickletAccelerometerV2.FUNCTION_SET_ACCELERATION_CALLBACK_CONFIGURATION = 4
BrickletAccelerometerV2.FUNCTION_SET_INFO_LED_CONFIG = 6
BrickletAccelerometerV2.FUNCTION_SET_CONTINUOUS_ACCELERATION_CONFIGURATION = 9
BrickletAccelerometerV2.FUNCTION_SET_FILTER_CONFIGURATION = 13
BrickletAccelerometerV2.FUNCTION_SET_WRITE_FIRMWARE_POINTER = 237
BrickletAccelerometerV2.FUNCTION_SET_STATUS_LED_CONFIG = 239
BrickletAccelerometerV2.FUNCTION_RESET = 243
BrickletAccelerometerV2.FUNCTION_WRITE_UID = 248
- void BrickletAccelerometerV2.setResponseExpectedAll(boolean responseExpected)¶
Parameter: - responseExpected – Typ: boolean
Ändert das Response-Expected-Flag für alle Setter-Funktionen und Konfigurationsfunktionen für Callbacks diese Gerätes.
Interne Funktionen¶
Interne Funktionen werden für Wartungsaufgaben, wie zum Beispiel das Flashen einer neuen Firmware oder das Ändern der UID eines Bricklets, verwendet. Diese Aufgaben sollten mit Brick Viewer durchgeführt werden, anstelle die internen Funktionen direkt zu verwenden.
- int BrickletAccelerometerV2.setBootloaderMode(int mode)¶
Parameter: - mode – Typ: int, Wertebereich: Siehe Konstanten
Rückgabe: - status – Typ: int, Wertebereich: Siehe Konstanten
Setzt den Bootloader-Modus und gibt den Status zurück nachdem die Modusänderungsanfrage bearbeitet wurde.
Mit dieser Funktion ist es möglich vom Bootloader- in den Firmware-Modus zu wechseln und umgekehrt. Ein Welchsel vom Bootloader- in der den Firmware-Modus ist nur möglich wenn Entry-Funktion, Device Identifier und CRC vorhanden und korrekt sind.
Diese Funktion wird vom Brick Viewer während des Flashens benutzt. In einem normalem Nutzerprogramm sollte diese Funktion nicht benötigt werden.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickletAccelerometerV2.BOOTLOADER_MODE_BOOTLOADER = 0
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE = 1
BrickletAccelerometerV2.BOOTLOADER_MODE_BOOTLOADER_WAIT_FOR_REBOOT = 2
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_REBOOT = 3
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_ERASE_AND_REBOOT = 4
Für status:
BrickletAccelerometerV2.BOOTLOADER_STATUS_OK = 0
BrickletAccelerometerV2.BOOTLOADER_STATUS_INVALID_MODE = 1
BrickletAccelerometerV2.BOOTLOADER_STATUS_NO_CHANGE = 2
BrickletAccelerometerV2.BOOTLOADER_STATUS_ENTRY_FUNCTION_NOT_PRESENT = 3
BrickletAccelerometerV2.BOOTLOADER_STATUS_DEVICE_IDENTIFIER_INCORRECT = 4
BrickletAccelerometerV2.BOOTLOADER_STATUS_CRC_MISMATCH = 5
- int BrickletAccelerometerV2.getBootloaderMode()¶
Rückgabe: - mode – Typ: int, Wertebereich: Siehe Konstanten
Gibt den aktuellen Bootloader-Modus zurück, siehe
setBootloaderMode().Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickletAccelerometerV2.BOOTLOADER_MODE_BOOTLOADER = 0
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE = 1
BrickletAccelerometerV2.BOOTLOADER_MODE_BOOTLOADER_WAIT_FOR_REBOOT = 2
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_REBOOT = 3
BrickletAccelerometerV2.BOOTLOADER_MODE_FIRMWARE_WAIT_FOR_ERASE_AND_REBOOT = 4
- void BrickletAccelerometerV2.setWriteFirmwarePointer(long pointer)¶
Parameter: - pointer – Typ: long, Einheit: 1 B, Wertebereich: [0 bis 232 - 1]
Setzt den Firmware-Pointer für
writeFirmware(). Der Pointer muss um je 64 Byte erhöht werden. Die Daten werden alle 4 Datenblöcke in den Flash geschrieben (4 Datenblöcke entsprechen einer Page mit 256 Byte).Diese Funktion wird vom Brick Viewer während des Flashens benutzt. In einem normalem Nutzerprogramm sollte diese Funktion nicht benötigt werden.
- int BrickletAccelerometerV2.writeFirmware(int[] data)¶
Parameter: - data – Typ: int[], Länge: 64, Wertebereich: [0 bis 255]
Rückgabe: - status – Typ: int, Wertebereich: [0 bis 255]
Schreibt 64 Bytes Firmware an die Position die vorher von
setWriteFirmwarePointer()gesetzt wurde. Die Firmware wird alle 4 Datenblöcke in den Flash geschrieben.Eine Firmware kann nur im Bootloader-Mode geschrieben werden.
Diese Funktion wird vom Brick Viewer während des Flashens benutzt. In einem normalem Nutzerprogramm sollte diese Funktion nicht benötigt werden.
- void BrickletAccelerometerV2.writeUID(long uid)¶
Parameter: - uid – Typ: long, Wertebereich: [0 bis 232 - 1]
Schreibt eine neue UID in den Flash. Die UID muss zuerst vom Base58 encodierten String in einen Integer decodiert werden.
Wir empfehlen die Nutzung des Brick Viewers zum ändern der UID.
- long BrickletAccelerometerV2.readUID()¶
Rückgabe: - uid – Typ: long, Wertebereich: [0 bis 232 - 1]
Gibt die aktuelle UID als Integer zurück. Dieser Integer kann als Base58 encodiert werden um an den üblichen UID-String zu gelangen.
Konstanten¶
- int BrickletAccelerometerV2.DEVICE_IDENTIFIER¶
Diese Konstante wird verwendet um ein Accelerometer Bricklet 2.0 zu identifizieren.
Die
getIdentity()Funktion und derIPConnection.EnumerateCallbackCallback der IP Connection haben eindeviceIdentifierParameter um den Typ des Bricks oder Bricklets anzugeben.
- String BrickletAccelerometerV2.DEVICE_DISPLAY_NAME¶
Diese Konstante stellt den Anzeigenamen eines Accelerometer Bricklet 2.0 dar.