- Einstieg
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ für Mikrocontroller
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Voraussetzungen
- Installation
- Test eines Beispiels
- API Referenz und Beispiele
- IP Connection
- Bricks
- Bricks (Abgekündigt)
- Bricklets
- Bricklets (Abgekündigt)
- Accelerometer Bricklet
- Ambient Light Bricklet
- Ambient Light Bricklet 2.0
- Analog In Bricklet
- Analog In Bricklet 2.0
- Analog Out Bricklet
- Analog Out Bricklet 2.0
- CO2 Bricklet
- Current12 Bricklet
- Current25 Bricklet
- Distance US Bricklet
- Dual Button Bricklet
- Dual Relay Bricklet
- GPS Bricklet
- Humidity Bricklet
- Industrial Analog Out Bricklet
- Industrial Digital In 4 Bricklet
- Industrial Dual Analog In Bricklet
- Industrial Quad Relay Bricklet
- IO-4 Bricklet
- Laser Range Finder Bricklet
- LCD 16x2 Bricklet
- LED Strip Bricklet
- Load Cell Bricklet
- Moisture Bricklet
- Motion Detector Bricklet
- NFC/RFID Bricklet
- OLED 128x64 Bricklet
- Piezo Buzzer Bricklet
- PTC Bricklet
- PTC Bricklet 2.0
- Remote Switch Bricklet
- RGB LED Bricklet
- RGB LED Matrix Bricklet
- Rotary Encoder Bricklet
- Solid State Relay Bricklet
- Temperature IR Bricklet
- Thermocouple Bricklet
- UV Light Bricklet
- Voltage Bricklet
- Voltage/Current Bricklet
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Quelltexte und Bug Tracking
- Programmierschnittstelle
- Kits
- Embedded Boards
- Spezifikationen
LabVIEW - Rotary Encoder Bricklet¶
Dies ist die Beschreibung der LabVIEW API Bindings für das Rotary Encoder Bricklet. Allgemeine Informationen über die Funktionen und technischen Spezifikationen des Rotary Encoder Bricklet sind in dessen Hardware Beschreibung zusammengefasst.
Eine Installationanleitung für die LabVIEW API Bindings ist Teil deren allgemeine Beschreibung.
Beispiele¶
Der folgende Beispielcode ist Public Domain (CC0 1.0).
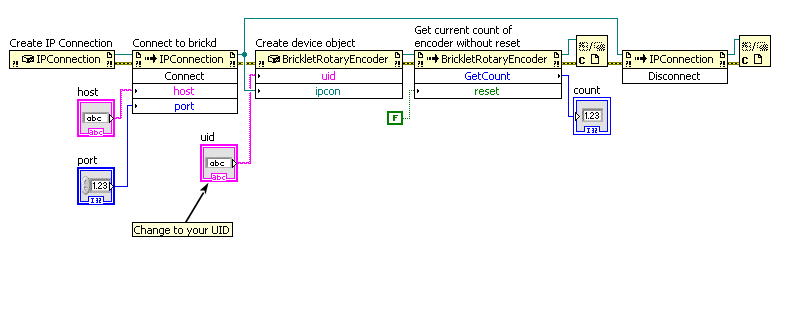
Simple¶
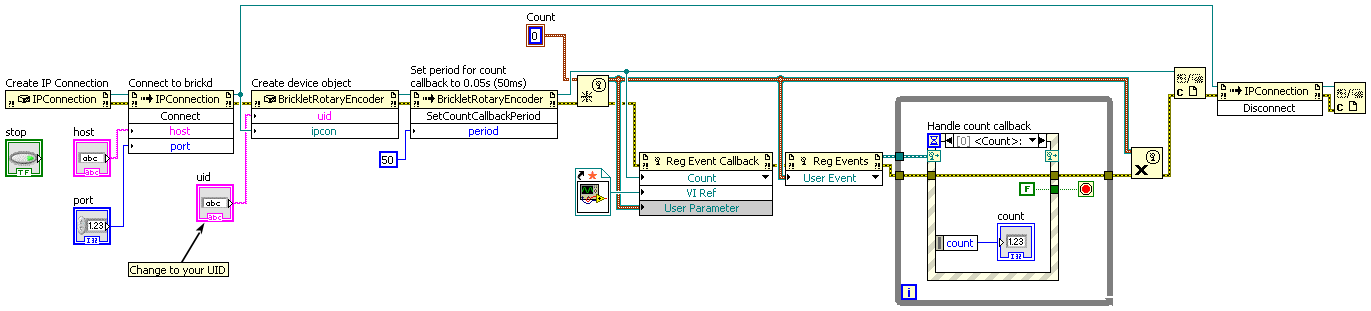
Callback¶
Download (Example Callback.vi), Download (Example Callback - Count Callback.vi)
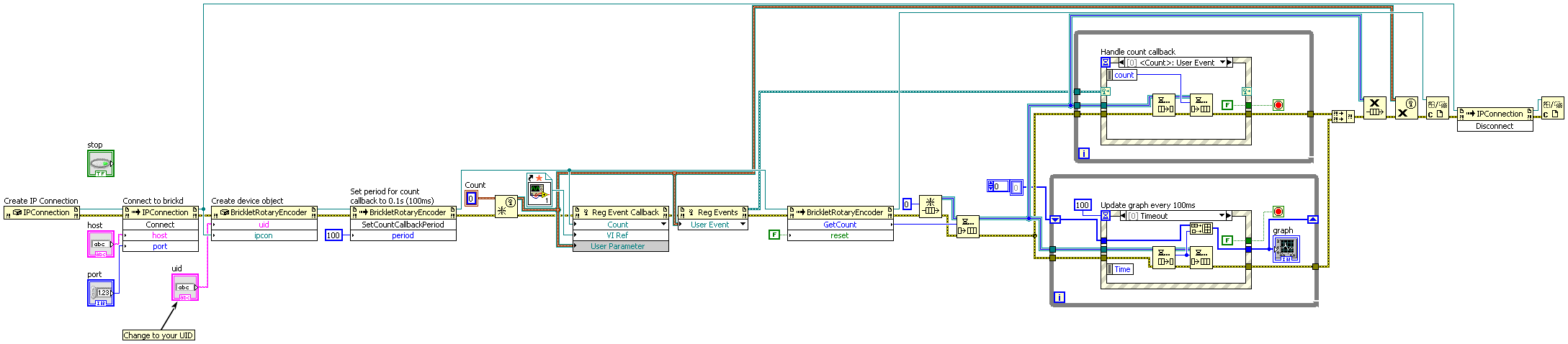
Graph¶
Download (Example Graph.vi), Download (Example Graph - Count Callback.vi)
API¶
Prinzipiell kann jede Funktion der LabVIEW Bindings, welche einen Wert ausgibt
eine Tinkerforge.TimeoutException melden. Dieser Fehler wird
gemeldet wenn das Gerät nicht antwortet. Wenn eine Kabelverbindung genutzt
wird, ist es unwahrscheinlich, dass die Exception geworfen wird (unter der
Annahme, dass das Gerät nicht abgesteckt wird). Bei einer drahtlosen Verbindung
können Zeitüberschreitungen auftreten, sobald die Entfernung zum Gerät zu
groß wird.
Der Namensraum für alle Brick/Bricklet Bindings und die IPConnection ist
Tinkerforge.*.
Grundfunktionen¶
- BrickletRotaryEncoder(uid, ipcon) rotaryEncoder¶
Eingabe: - uid – Typ: String
- ipcon – Typ: .NET Refnum (IPConnection)
Ausgabe: - rotaryEncoder – Typ: .NET Refnum (BrickletRotaryEncoder)
Erzeugt ein Objekt mit der eindeutigen Geräte ID
uid. Dieses Objekt kann benutzt werden, nachdem die IP Connection verbunden ist.
- BrickletRotaryEncoder.GetCount(reset) count¶
Eingabe: - reset – Typ: Boolean
Ausgabe: - count – Typ: Int32, Wertebereich: [-231 bis 231 - 1]
Gibt den aktuellen Zählerwert des Encoders zurück. Wenn reset auf true gesetzt wird, wird der Zählerstand direkt nach dem auslesen auf 0 zurück gesetzt.
Der Encoder hat 24 Schritte pro Umdrehung.
Wenn der Encoder nach links gedreht wird wird der Zählerwert dekrementiert, d.h. negative Zählerwerte sind möglich.
- BrickletRotaryEncoder.IsPressed() pressed¶
Ausgabe: - pressed – Typ: Boolean
Gibt true zurück wenn der Taster gedrückt ist und sonst false.
Es wird empfohlen die
PressedCallbackundReleasedCallbackCallbacks zu nutzen, um den Taster programmatisch zu behandeln.
Fortgeschrittene Funktionen¶
- BrickletRotaryEncoder.GetIdentity() uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶
Ausgabe: - uid – Typ: String, Länge: bis zu 8
- connectedUid – Typ: String, Länge: bis zu 8
- position – Typ: Char, Wertebereich: ["a" bis "h", "z"]
- hardwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- firmwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- deviceIdentifier – Typ: Int32, Wertebereich: [0 bis 216 - 1]
Gibt die UID, die UID zu der das Bricklet verbunden ist, die Position, die Hard- und Firmware Version sowie den Device Identifier zurück.
Die Position ist 'a', 'b', 'c', 'd', 'e', 'f', 'g' oder 'h' (Bricklet Anschluss). Ein Bricklet hinter einem Isolator Bricklet ist immer an Position 'z'.
Eine Liste der Device Identifier Werte ist hier zu finden. Es gibt auch eine Konstante für den Device Identifier dieses Bricklets.
Konfigurationsfunktionen für Callbacks¶
- BrickletRotaryEncoder.SetCountCallbackPeriod(period)¶
Eingabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Setzt die Periode mit welcher der
CountCallbackCallback ausgelöst wird. Ein Wert von 0 deaktiviert den Callback.Der
CountCallbackCallback wird nur ausgelöst, wenn sich der Zählerwert seit der letzten Auslösung geändert hat.
- BrickletRotaryEncoder.GetCountCallbackPeriod() period¶
Ausgabe: - period – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 0
Gibt die Periode zurück, wie von
SetCountCallbackPeriod()gesetzt.
- BrickletRotaryEncoder.SetCountCallbackThreshold(option, min, max)¶
Eingabe: - option – Typ: Char, Wertebereich: Siehe Konstanten, Standardwert: "x"
- min – Typ: Int32, Wertebereich: [-231 bis 231 - 1], Standardwert: 0
- max – Typ: Int32, Wertebereich: [-231 bis 231 - 1], Standardwert: 0
Setzt den Schwellwert für den
CountReachedCallbackCallback.Die folgenden Optionen sind möglich:
Option
Beschreibung
'x'
Callback ist inaktiv
'o'
Callback wird ausgelöst, wenn der Zählerwert außerhalb der min und max Werte ist
'i'
Callback wird ausgelöst, wenn die Zählerwert innerhalb der min und max Werte ist
'<'
Callback wird ausgelöst, wenn die Zählerwert kleiner als der min Wert ist (max wird ignoriert)
'>'
Callback wird ausgelöst, wenn die Zählerwert größer als der min Wert ist (max wird ignoriert)
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für option:
BrickletRotaryEncoder.THRESHOLD_OPTION_OFF = "x"
BrickletRotaryEncoder.THRESHOLD_OPTION_OUTSIDE = "o"
BrickletRotaryEncoder.THRESHOLD_OPTION_INSIDE = "i"
BrickletRotaryEncoder.THRESHOLD_OPTION_SMALLER = "<"
BrickletRotaryEncoder.THRESHOLD_OPTION_GREATER = ">"
- BrickletRotaryEncoder.GetCountCallbackThreshold() option, min, max¶
Ausgabe: - option – Typ: Char, Wertebereich: Siehe Konstanten, Standardwert: "x"
- min – Typ: Int32, Wertebereich: [-231 bis 231 - 1], Standardwert: 0
- max – Typ: Int32, Wertebereich: [-231 bis 231 - 1], Standardwert: 0
Gibt den Schwellwert zurück, wie von
SetCountCallbackThreshold()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für option:
BrickletRotaryEncoder.THRESHOLD_OPTION_OFF = "x"
BrickletRotaryEncoder.THRESHOLD_OPTION_OUTSIDE = "o"
BrickletRotaryEncoder.THRESHOLD_OPTION_INSIDE = "i"
BrickletRotaryEncoder.THRESHOLD_OPTION_SMALLER = "<"
BrickletRotaryEncoder.THRESHOLD_OPTION_GREATER = ">"
- BrickletRotaryEncoder.SetDebouncePeriod(debounce)¶
Eingabe: - debounce – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 100
Setzt die Periode mit welcher der Schwellwert-Callback
ausgelöst wird, wenn der Schwellwert
weiterhin erreicht bleibt.
- BrickletRotaryEncoder.GetDebouncePeriod() debounce¶
Ausgabe: - debounce – Typ: Int64, Einheit: 1 ms, Wertebereich: [0 bis 232 - 1], Standardwert: 100
Gibt die Entprellperiode zurück, wie von
SetDebouncePeriod()gesetzt.
Callbacks¶
Callbacks können registriert werden um zeitkritische oder wiederkehrende Daten vom Gerät zu erhalten. Die Registrierung erfolgt indem eine Funktion einem Callback Property des Geräte Objektes zugewiesen wird. Die verfügbaren Callback Properties und ihre Parametertypen werden weiter unten beschrieben.
Bemerkung
Callbacks für wiederkehrende Ereignisse zu verwenden ist immer zu bevorzugen gegenüber der Verwendung von Abfragen. Es wird weniger USB-Bandbreite benutzt und die Latenz ist erheblich geringer, da es keine Paketumlaufzeit gibt.
- event BrickletRotaryEncoder.CountCallback sender, count¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletRotaryEncoder)
- count – Typ: Int32, Wertebereich: [-231 bis 231 - 1]
Dieser Callback wird mit der Periode, wie gesetzt mit
SetCountCallbackPeriod(), ausgelöst. Der Parameter ist der Zählerwert des Encoders.Der
CountCallbackCallback wird nur ausgelöst, wenn sich der Zähler seit der letzten Auslösung geändert hat.
- event BrickletRotaryEncoder.CountReachedCallback sender, count¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletRotaryEncoder)
- count – Typ: Int32, Wertebereich: [-231 bis 231 - 1]
Dieser Callback wird ausgelöst, wenn der Schwellwert, wie von
SetCountCallbackThreshold()gesetzt, erreicht wird. Der Parameter ist der Zählerwert des Encoders.Wenn der Schwellwert erreicht bleibt, wird der Callback mit der Periode, wie mit
SetDebouncePeriod()gesetzt, ausgelöst.
- event BrickletRotaryEncoder.PressedCallback sender¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletRotaryEncoder)
Dieser Callback wird ausgelöst, wenn der Taster gedrückt wird.
- event BrickletRotaryEncoder.ReleasedCallback sender¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletRotaryEncoder)
Dieser Callback wird ausgelöst, wenn der Taster losgelassen wird.
Virtuelle Funktionen¶
Virtuelle Funktionen kommunizieren nicht mit dem Gerät selbst, sie arbeiten nur auf dem API Bindings Objekt. Dadurch können sie auch aufgerufen werden, ohne das das dazugehörige IP Connection Objekt verbunden ist.
- BrickletRotaryEncoder.GetAPIVersion() apiVersion¶
Ausgabe: - apiVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
Gibt die Version der API Definition zurück, die diese API Bindings implementieren. Dies ist weder die Release-Version dieser API Bindings noch gibt es in irgendeiner Weise Auskunft über den oder das repräsentierte(n) Brick oder Bricklet.
- BrickletRotaryEncoder.GetResponseExpected(functionId) responseExpected¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
Ausgabe: - responseExpected – Typ: Boolean
Gibt das Response-Expected-Flag für die Funktion mit der angegebenen Funktions IDs zurück. Es ist true falls für die Funktion beim Aufruf eine Antwort erwartet wird, false andernfalls.
Für Getter-Funktionen ist diese Flag immer gesetzt und kann nicht entfernt werden, da diese Funktionen immer eine Antwort senden. Für Konfigurationsfunktionen für Callbacks ist es standardmäßig gesetzt, kann aber entfernt werden mittels
SetResponseExpected(). Für Setter-Funktionen ist es standardmäßig nicht gesetzt, kann aber gesetzt werden.Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletRotaryEncoder.FUNCTION_SET_COUNT_CALLBACK_PERIOD = 2
BrickletRotaryEncoder.FUNCTION_SET_COUNT_CALLBACK_THRESHOLD = 4
BrickletRotaryEncoder.FUNCTION_SET_DEBOUNCE_PERIOD = 6
- BrickletRotaryEncoder.SetResponseExpected(functionId, responseExpected)¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
- responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für die Funktion mit der angegebenen Funktion IDs. Diese Flag kann nur für Setter-Funktionen (Standardwert: false) und Konfigurationsfunktionen für Callbacks (Standardwert: true) geändert werden. Für Getter-Funktionen ist das Flag immer gesetzt.
Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletRotaryEncoder.FUNCTION_SET_COUNT_CALLBACK_PERIOD = 2
BrickletRotaryEncoder.FUNCTION_SET_COUNT_CALLBACK_THRESHOLD = 4
BrickletRotaryEncoder.FUNCTION_SET_DEBOUNCE_PERIOD = 6
- BrickletRotaryEncoder.SetResponseExpectedAll(responseExpected)¶
Eingabe: - responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für alle Setter-Funktionen und Konfigurationsfunktionen für Callbacks diese Gerätes.
Konstanten¶
- BrickletRotaryEncoder.DEVICE_IDENTIFIER¶
Diese Konstante wird verwendet um ein Rotary Encoder Bricklet zu identifizieren.
Die
GetIdentity()Funktion und derIPConnection.EnumerateCallbackCallback der IP Connection haben eindeviceIdentifierParameter um den Typ des Bricks oder Bricklets anzugeben.
- BrickletRotaryEncoder.DEVICE_DISPLAY_NAME¶
Diese Konstante stellt den Anzeigenamen eines Rotary Encoder Bricklet dar.