- Einstieg
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ für Mikrocontroller
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Voraussetzungen
- Installation
- Test eines Beispiels
- API Referenz und Beispiele
- IP Connection
- Bricks
- Bricks (Abgekündigt)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Abgekündigt)
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Quelltexte und Bug Tracking
- Programmierschnittstelle
- Kits
- Embedded Boards
- Spezifikationen
LabVIEW - CAN Bricklet¶
Dies ist die Beschreibung der LabVIEW API Bindings für das CAN Bricklet. Allgemeine Informationen über die Funktionen und technischen Spezifikationen des CAN Bricklet sind in dessen Hardware Beschreibung zusammengefasst.
Eine Installationanleitung für die LabVIEW API Bindings ist Teil deren allgemeine Beschreibung.
Beispiele¶
Der folgende Beispielcode ist Public Domain (CC0 1.0).
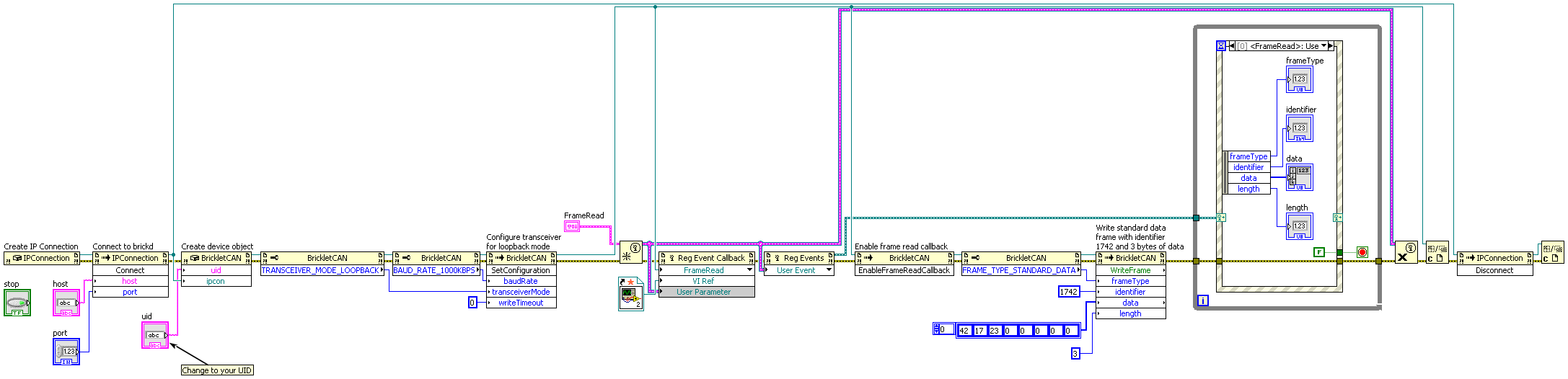
Loopback¶
Download (Example Loopback.vi), Download (Example Loopback - FrameRead Callback.vi)
API¶
Prinzipiell kann jede Funktion der LabVIEW Bindings, welche einen Wert ausgibt
eine Tinkerforge.TimeoutException melden. Dieser Fehler wird
gemeldet wenn das Gerät nicht antwortet. Wenn eine Kabelverbindung genutzt
wird, ist es unwahrscheinlich, dass die Exception geworfen wird (unter der
Annahme, dass das Gerät nicht abgesteckt wird). Bei einer drahtlosen Verbindung
können Zeitüberschreitungen auftreten, sobald die Entfernung zum Gerät zu
groß wird.
Der Namensraum für alle Brick/Bricklet Bindings und die IPConnection ist
Tinkerforge.*.
Grundfunktionen¶
- BrickletCAN(uid, ipcon) can¶
Eingabe: - uid – Typ: String
- ipcon – Typ: .NET Refnum (IPConnection)
Ausgabe: - can – Typ: .NET Refnum (BrickletCAN)
Erzeugt ein Objekt mit der eindeutigen Geräte ID
uid. Dieses Objekt kann benutzt werden, nachdem die IP Connection verbunden ist.
- BrickletCAN.WriteFrame(frameType, identifier, data, length) success¶
Eingabe: - frameType – Typ: Byte, Wertebereich: Siehe Konstanten
- identifier – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- data – Typ: Byte[8], Wertebereich: [0 bis 255]
- length – Typ: Byte, Wertebereich: [0 bis 15]
Ausgabe: - success – Typ: Boolean
Schreibt einen Data- oder Remote-Frame in den Schreib-Buffer, damit dieser über den CAN-Transceiver übertragen wird.
Das Bricklet unterstützt die Standard 11-Bit (CAN 2.0A) und die zusätzlichen Extended 18-Bit (CAN 2.0B) Identifier. Für Standard-Frames verwendet das Bricklet Bit 0 bis 10 des
identifierParameters als Standard 11-Bit Identifier. Für Extended-Frames verwendet das Bricklet zusätzlich Bit 11 bis 28 desidentifierParameters als Extended 18-Bit Identifier.Für Remote-Frames wird der
dataParameter ignoriert.Gibt true zurück, wenn der Frame dem Schreib-Buffer erfolgreich hinzugefügt wurde. Gibt false zurück wenn Frame nicht hinzugefügt werden konnte, weil der Schreib-Buffer bereits voll ist.
Der Schreib-Buffer kann überlaufen, wenn Frames schneller geschrieben werden als das Bricklet sie über deb CAN-Transceiver übertragen kann. Dies kann dadurch passieren, dass der CAN-Transceiver als nur-lesend oder mit einer niedrigen Baudrate konfiguriert ist (siehe
SetConfiguration()). Es kann auch sein, dass der CAN-Bus stark belastet ist und der Frame nicht übertragen werden kann, da er immer wieder die Arbitrierung verliert. Ein anderer Grund kann sein, dass der CAN-Transceiver momentan deaktiviert ist, bedingt duch ein hohes Schreib-Fehlerlevel (sieheGetErrorLog()).Die folgenden Konstanten sind für diese Funktion verfügbar:
Für frameType:
BrickletCAN.FRAME_TYPE_STANDARD_DATA = 0
BrickletCAN.FRAME_TYPE_STANDARD_REMOTE = 1
BrickletCAN.FRAME_TYPE_EXTENDED_DATA = 2
BrickletCAN.FRAME_TYPE_EXTENDED_REMOTE = 3
- BrickletCAN.ReadFrame() success, frameType, identifier, data, length¶
Ausgabe: - success – Typ: Boolean
- frameType – Typ: Byte, Wertebereich: Siehe Konstanten
- identifier – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- data – Typ: Byte[8], Wertebereich: [0 bis 255]
- length – Typ: Byte, Wertebereich: [0 bis 15]
Versucht den nächsten Data- oder Remote-Frame aus dem Lese-Buffer zu lesen und zurückzugeben. Falls ein Frame erfolgreich gelesen wurde, dann wird der
successRückgabewert auf true gesetzt und die anderen Rückgabewerte beinhalte den gelesenen Frame. Falls der Lese-Buffer leer ist und kein Frame gelesen werden konnte, dann wird dersuccessRückgabewert auf false gesetzt und die anderen Rückgabewerte beinhalte ungültige Werte.Der
identifierRückgabewerte folgt dem fürWriteFrame()beschriebenen Format.Für Remote-Frames beinhalte der
dataRückgabewerte immer ungültigen Werte.Mittels eines einstellbaren Lesefilters kann festgelegt werden, welche Frames vom CAN-Transceiver überhaupt empfangen und im Lese-Buffer abgelegt werden sollen (siehe
SetReadFilter()).Anstatt mit dieser Funktion zu pollen, ist es auch möglich Callbacks zu nutzen. Siehe die
EnableFrameReadCallback()Funktion und denFrameReadCallbackCallback.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für frameType:
BrickletCAN.FRAME_TYPE_STANDARD_DATA = 0
BrickletCAN.FRAME_TYPE_STANDARD_REMOTE = 1
BrickletCAN.FRAME_TYPE_EXTENDED_DATA = 2
BrickletCAN.FRAME_TYPE_EXTENDED_REMOTE = 3
- BrickletCAN.SetConfiguration(baudRate, transceiverMode, writeTimeout)¶
Eingabe: - baudRate – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 3
- transceiverMode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 0
- writeTimeout – Typ: Int32, Wertebereich: [-1 bis 231 - 1], Standardwert: 0
Setzt die Konfiguration für die CAN-Bus-Kommunikation.
Die Baudrate kann in Schritten zwischen 10 und 1000 kBit/s eingestellt werden.
Der CAN-Transceiver hat drei verschiedene Modi:
Normal: Es wird vom CAN-Bus gelesen und auf den CAN-Bus geschrieben und aktiv an der Bus-Fehlererkennung und dem Acknowledgement mitgewirkt.
Loopback: Alle Lese- und Schreiboperationen werden intern durchgeführt. Der Transceiver ist nicht mit dem eigentlichen CAN-Bus verbunden.
Read-Only: Es wird nur vom CAN-Bus gelesen, allerdings ohne aktiv an der Bus-Fehlererkennung oder dem Acknowledgement mitzuwirken. Nur der empfangende Teil des Transceivers ist mit dem CAN-Bus verbunden.
Der Schreib-Timeout hat drei verschiedene Modi, die festlegen wie mit einer fehlgeschlagen Frame-Übertragung umgegangen werden soll:
One-Shot (= -1): Es wird nur ein Übertragungsversuch durchgeführt. Falls die Übertragung fehlschlägt wird der Frame verworfen.
Infinite (= 0): Es werden unendlich viele Übertragungsversuche durchgeführt. Der Frame wird niemals verworfen.
Milliseconds (> 0): Es wird eine beschränkte Anzahl Übertragungsversuche durchgeführt. Falls der Frame nach der eingestellten Anzahl Millisekunden noch nicht erfolgreich übertragen wurde, dann wird er verworfen.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für baudRate:
BrickletCAN.BAUD_RATE_10KBPS = 0
BrickletCAN.BAUD_RATE_20KBPS = 1
BrickletCAN.BAUD_RATE_50KBPS = 2
BrickletCAN.BAUD_RATE_125KBPS = 3
BrickletCAN.BAUD_RATE_250KBPS = 4
BrickletCAN.BAUD_RATE_500KBPS = 5
BrickletCAN.BAUD_RATE_800KBPS = 6
BrickletCAN.BAUD_RATE_1000KBPS = 7
Für transceiverMode:
BrickletCAN.TRANSCEIVER_MODE_NORMAL = 0
BrickletCAN.TRANSCEIVER_MODE_LOOPBACK = 1
BrickletCAN.TRANSCEIVER_MODE_READ_ONLY = 2
- BrickletCAN.GetConfiguration() baudRate, transceiverMode, writeTimeout¶
Ausgabe: - baudRate – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 3
- transceiverMode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 0
- writeTimeout – Typ: Int32, Wertebereich: [-1 bis 231 - 1], Standardwert: 0
Gibt die Konfiguration zurück, wie von
SetConfiguration()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für baudRate:
BrickletCAN.BAUD_RATE_10KBPS = 0
BrickletCAN.BAUD_RATE_20KBPS = 1
BrickletCAN.BAUD_RATE_50KBPS = 2
BrickletCAN.BAUD_RATE_125KBPS = 3
BrickletCAN.BAUD_RATE_250KBPS = 4
BrickletCAN.BAUD_RATE_500KBPS = 5
BrickletCAN.BAUD_RATE_800KBPS = 6
BrickletCAN.BAUD_RATE_1000KBPS = 7
Für transceiverMode:
BrickletCAN.TRANSCEIVER_MODE_NORMAL = 0
BrickletCAN.TRANSCEIVER_MODE_LOOPBACK = 1
BrickletCAN.TRANSCEIVER_MODE_READ_ONLY = 2
Fortgeschrittene Funktionen¶
- BrickletCAN.SetReadFilter(mode, mask, filter1, filter2)¶
Eingabe: - mode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
- mask – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- filter1 – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- filter2 – Typ: Int64, Wertebereich: [0 bis 230 - 1]
Setzt die Konfiguration für den Lesefilter. Damit kann festgelegt werden, welche Frames von der CAN-Transceiver überhaupt empfangen und im Lese-Buffer abgelegt werden sollen.
Der Lesefilter hat fünf verschiedene Modi, die festlegen ob und wie die Maske und die beiden Filter angewendet werden:
Disabled: Es wird keinerlei Filterung durchgeführt. Alle Frames inklusive unvollständiger und fehlerhafter Frames werden empfangen. Dieser Modus sollte nur für Debugging-Zwecke verwendet werden.
Accept-All: Alle vollständigen und fehlerfreien Frames werden empfangen.
Match-Standard: Nur Standard-Frames, deren Identifier der eingestellten Maske und Filtern entspricht, werden empfangen.
Match-Standard-and-Data: Nur Standard-Frames, deren Identifier und Daten der eingestellten Maske und Filtern entspricht, werden empfangen.
Match-Extended: Nur Extended-Frames, deren Identifier der eingestellten Maske und Filtern entspricht, werden empfangen.
Maske und Filter werden als Bitmasken verwendet. Ihre Verwendung hängt vom Modus ab:
Disabled: Maske und Filter werden ignoriert.
Accept-All: Maske und Filter werden ignoriert.
Match-Standard: Bit 0 bis 10 (11 Bits) der Maske und Filter werden zum Abgleich mit dem 11-Bit Identifier von Standard-Frames verwendet.
Match-Standard-and-Data: Bit 0 bis 10 (11 Bits) der Maske und Filter werden zum Abgleich mit dem 11-Bit Identifier von Standard-Frames verwendet. Bit 11 bis 18 (8 Bits) und Bit 19 bis 26 (8 Bits) der Maske und Filter werden zum Abgleich mit dem ersten und zweiten Daten-Byte (sofern vorhanden) von Standard-Frames verwendet.
Match-Extended: Bit 0 bis 10 (11 Bits) der Maske und Filter werden zum Abgleich mit dem Standard 11-Bit Identifier-Teil von Extended-Frames verwendet. Bit 11 bis 28 (18 Bits) der Maske und Filter werden zum Abgleich mit dem Extended 18-Bit Identifier-Teil von Extended-Frames verwendet.
Maske und Filter werden auf diese Weise angewendet: Mit der Maske werden die Identifier- und Daten-Bits ausgewählt, die mit den entsprechenden Filter-Bits verglichen werden sollen. Alle nicht-ausgewählten Bits werden automatisch akzeptiert. Alle ausgewählten Bits müssen einem der beiden Filter entsprechen, um akzeptiert zu werden. Wenn alle Bits für den ausgewählte Modus akzeptiert wurden, dann ist der Frame akzeptiert und wird im Lese-Buffer abgelegt.
Masken-Bit
Filter-Bit
Identifier/Daten-Bit
Ergebnis
0
X
X
akzeptiert
1
0
0
akzeptiert
1
0
1
verworfen
1
1
0
verworfen
1
1
1
akzeptiert
Ein Beispiel: Um nur Standard-Frames mit Identifier 0x123 zu empfangen kann der Modus auf Match-Standard mit 0x7FF als Maske und 0x123 als Filter 1 und Filter 2 eingestellt werden. Die Maske 0x7FF wählt alle 11 Identifier-Bits zum Abgleich aus, so dass der Identifier exakt 0x123 sein muss um akzeptiert zu werden.
Um Identifier 0x123 und 0x456 gleichzeitig zu akzeptieren kann Filter 2 auf 0x456 gesetzt und die Maske und Filter 1 beibehalten werden.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickletCAN.FILTER_MODE_DISABLED = 0
BrickletCAN.FILTER_MODE_ACCEPT_ALL = 1
BrickletCAN.FILTER_MODE_MATCH_STANDARD = 2
BrickletCAN.FILTER_MODE_MATCH_STANDARD_AND_DATA = 3
BrickletCAN.FILTER_MODE_MATCH_EXTENDED = 4
- BrickletCAN.GetReadFilter() mode, mask, filter1, filter2¶
Ausgabe: - mode – Typ: Byte, Wertebereich: Siehe Konstanten, Standardwert: 1
- mask – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- filter1 – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- filter2 – Typ: Int64, Wertebereich: [0 bis 230 - 1]
Gibt die Lesefilter zurück, wie von
SetReadFilter()gesetzt.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für mode:
BrickletCAN.FILTER_MODE_DISABLED = 0
BrickletCAN.FILTER_MODE_ACCEPT_ALL = 1
BrickletCAN.FILTER_MODE_MATCH_STANDARD = 2
BrickletCAN.FILTER_MODE_MATCH_STANDARD_AND_DATA = 3
BrickletCAN.FILTER_MODE_MATCH_EXTENDED = 4
- BrickletCAN.GetErrorLog() writeErrorLevel, readErrorLevel, transceiverDisabled, writeTimeoutCount, readRegisterOverflowCount, readBufferOverflowCount¶
Ausgabe: - writeErrorLevel – Typ: Byte, Wertebereich: [0 bis 255]
- readErrorLevel – Typ: Byte, Wertebereich: [0 bis 255]
- transceiverDisabled – Typ: Boolean
- writeTimeoutCount – Typ: Int64, Wertebereich: [0 bis 232 - 1]
- readRegisterOverflowCount – Typ: Int64, Wertebereich: [0 bis 232 - 1]
- readBufferOverflowCount – Typ: Int64, Wertebereich: [0 bis 232 - 1]
Gibt Informationen über verschiedene Fehlerarten zurück.
Die Schreib- und Lesefehler-Level geben Aufschluss über das aktuelle Level der Prüfsummen-, Acknowledgement-, Form-, Bit- und Stuffing-Fehler während CAN-Bus Schreib- und Leseoperationen.
Wenn das Schreibfehler-Level 255 überschreitet dann wird der CAN-Transceiver deaktiviert und es können keine Frames mehr übertragen und empfangen werden. Wenn auf dem CAN-Bus für eine Weile Ruhe herrscht, dann wird der CAN-Transceiver automatisch wieder aktiviert.
Die Schreib- und Lesefehler-Level Werte sind im Read-Only Transceiver-Modus nicht verfügbar (see
SetConfiguration()). Außerdem werden sie als Seiteneffekt von Konfigurations- und Lesefilteränderungen auf 0 zurückgesetzt.Die Werte für Schreib-Timeout, Lese-Register- und Lese-Buffer-Überlauf zählen die Anzahl dieser Fehler:
Ein Schreib-Timeout tritt dann auf, wenn ein Frame nicht übertragen werden konnte bevor der eingestellte Schreib-Timeout abgelaufen ist (siehe
SetConfiguration()).Ein Lese-Register-Überlauf tritt dann auf, wenn im Lese-Register des CAN-Transceiver noch der zuletzt empfangen Frame steht wenn der nächste Frame ankommt. In diesem Fall geht der neu ankommende Frame verloren. Dies passiert, wenn der CAN-Transceiver mehr Frames empfängt als das Bricklet behandeln kann. Mit Hilfe des Lesefilters (siehe
SetReadFilter()) kann die Anzahl der empfangen Frames verringert werden. Dieser Zähler ist nicht exakt, sondern stellt eine untere Grenze da. Es kann vorkommen, dass das Bricklet nicht alle Überläufe erkennt, wenn diese in schneller Abfolge auftreten.Ein Lese-Buffer-Überlauf tritt dann auf, wenn der Lese-Buffer des Bricklets bereits voll ist und noch ein Frame vom Lese-Register des CAN-Transceiver gelesen werden soll. In diesem Fall geht der Frame im Lese-Register verloren. Dies passiert, wenn der CAN-Transceiver mehr Frames empfängt, die dem Lese-Buffer hinzugefügt werden sollen, als Frames mit der
ReadFrame()Funktion aus dem Lese-Buffer entnommen werden. Die Verwendung desFrameReadCallbackCallbacks stellt sicher, dass der Lese-Buffer nicht überlaufen kann.
- BrickletCAN.GetIdentity() uid, connectedUid, position, hardwareVersion, firmwareVersion, deviceIdentifier¶
Ausgabe: - uid – Typ: String, Länge: bis zu 8
- connectedUid – Typ: String, Länge: bis zu 8
- position – Typ: Char, Wertebereich: ["a" bis "h", "z"]
- hardwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- firmwareVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
- deviceIdentifier – Typ: Int32, Wertebereich: [0 bis 216 - 1]
Gibt die UID, die UID zu der das Bricklet verbunden ist, die Position, die Hard- und Firmware Version sowie den Device Identifier zurück.
Die Position ist 'a', 'b', 'c', 'd', 'e', 'f', 'g' oder 'h' (Bricklet Anschluss). Ein Bricklet hinter einem Isolator Bricklet ist immer an Position 'z'.
Eine Liste der Device Identifier Werte ist hier zu finden. Es gibt auch eine Konstante für den Device Identifier dieses Bricklets.
Konfigurationsfunktionen für Callbacks¶
- BrickletCAN.EnableFrameReadCallback()¶
Aktiviert den
FrameReadCallbackCallback.Standardmäßig ist der Callback deaktiviert. Wenn dieser Callback aktiviert wird, wird der
FrameReadableCallbackCallback deaktiviert.
- BrickletCAN.DisableFrameReadCallback()¶
Deaktiviert den
FrameReadCallbackCallback.Standardmäßig ist der Callback deaktiviert.
- BrickletCAN.IsFrameReadCallbackEnabled() enabled¶
Ausgabe: - enabled – Typ: Boolean, Standardwert: F
Gibt true zurück falls der
FrameReadCallbackCallback aktiviert ist, false sonst.
- BrickletCAN.SetFrameReadableCallbackConfiguration(enabled)¶
Eingabe: - enabled – Typ: Boolean, Standardwert: F
Aktiviert/deaktiviert den
FrameReadableCallbackCallback.Standardmäßig ist der Callback deaktiviert. Wenn dieser Callback aktiviert wird, wird der
FrameReadCallbackCallback deaktiviert.Neu in Version 2.0.1$nbsp;(Plugin).
- BrickletCAN.GetFrameReadableCallbackConfiguration() enabled¶
Ausgabe: - enabled – Typ: Boolean, Standardwert: F
Gibt true zurück falls der
FrameReadableCallbackCallback aktiviert ist, false sonst.Neu in Version 2.0.1$nbsp;(Plugin).
Callbacks¶
Callbacks können registriert werden um zeitkritische oder wiederkehrende Daten vom Gerät zu erhalten. Die Registrierung erfolgt indem eine Funktion einem Callback Property des Geräte Objektes zugewiesen wird. Die verfügbaren Callback Properties und ihre Parametertypen werden weiter unten beschrieben.
Bemerkung
Callbacks für wiederkehrende Ereignisse zu verwenden ist immer zu bevorzugen gegenüber der Verwendung von Abfragen. Es wird weniger USB-Bandbreite benutzt und die Latenz ist erheblich geringer, da es keine Paketumlaufzeit gibt.
- event BrickletCAN.FrameReadCallback sender, frameType, identifier, data, length¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletCAN)
- frameType – Typ: Byte, Wertebereich: Siehe Konstanten
- identifier – Typ: Int64, Wertebereich: [0 bis 230 - 1]
- data – Typ: Byte[8], Wertebereich: [0 bis 255]
- length – Typ: Byte, Wertebereich: [0 bis 15]
Dieser Callback wird ausgelöst, sobald ein Data- oder Remote-Frame vom CAN-Transceiver empfangen wurde.
Der
identifierRückgabewerte folgt dem fürWriteFrame()beschriebenen Format.Für Remote-Frames beinhalte der
dataRückgabewerte immer ungültigen Werte.Mittels eines einstellbaren Lesefilters kann festgelegt werden, welche Frames von der CAN-Transceiver überhaupt empfangen werden sollen (siehe
SetReadFilter()).Dieser Callback kann durch
EnableFrameReadCallback()aktiviert werden.Die folgenden Konstanten sind für diese Funktion verfügbar:
Für frameType:
BrickletCAN.FRAME_TYPE_STANDARD_DATA = 0
BrickletCAN.FRAME_TYPE_STANDARD_REMOTE = 1
BrickletCAN.FRAME_TYPE_EXTENDED_DATA = 2
BrickletCAN.FRAME_TYPE_EXTENDED_REMOTE = 3
- event BrickletCAN.FrameReadableCallback sender¶
Callback-Ausgabe: - sender – Typ: .NET Refnum (BrickletCAN)
Dieser Callback wird ausgelöst, sobald ein Data- oder Remote-Frame vom CAN-Transceiver empfangen wurde. Der empfangene Frame kann mit
ReadFrame()ausgelesen werden. Falls weitere Frames empfangen werden, bevorReadFrame()aufgerufen wurde, wird der Callback nicht erneut ausgelöst.Mittels eines einstellbaren Lesefilters kann festgelegt werden, welche Frames vom CAN-Transceiver überhaupt empfangen und im Lese-Queue abgelegt werden sollen (siehe
SetReadFilter()).Dieser Callback kann durch
SetFrameReadableCallbackConfiguration()aktiviert werden.Neu in Version 2.0.1$nbsp;(Plugin).
Virtuelle Funktionen¶
Virtuelle Funktionen kommunizieren nicht mit dem Gerät selbst, sie arbeiten nur auf dem API Bindings Objekt. Dadurch können sie auch aufgerufen werden, ohne das das dazugehörige IP Connection Objekt verbunden ist.
- BrickletCAN.GetAPIVersion() apiVersion¶
Ausgabe: - apiVersion – Typ: Byte[3]
- 0: major – Typ: Byte, Wertebereich: [0 bis 255]
- 1: minor – Typ: Byte, Wertebereich: [0 bis 255]
- 2: revision – Typ: Byte, Wertebereich: [0 bis 255]
Gibt die Version der API Definition zurück, die diese API Bindings implementieren. Dies ist weder die Release-Version dieser API Bindings noch gibt es in irgendeiner Weise Auskunft über den oder das repräsentierte(n) Brick oder Bricklet.
- BrickletCAN.GetResponseExpected(functionId) responseExpected¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
Ausgabe: - responseExpected – Typ: Boolean
Gibt das Response-Expected-Flag für die Funktion mit der angegebenen Funktions IDs zurück. Es ist true falls für die Funktion beim Aufruf eine Antwort erwartet wird, false andernfalls.
Für Getter-Funktionen ist diese Flag immer gesetzt und kann nicht entfernt werden, da diese Funktionen immer eine Antwort senden. Für Konfigurationsfunktionen für Callbacks ist es standardmäßig gesetzt, kann aber entfernt werden mittels
SetResponseExpected(). Für Setter-Funktionen ist es standardmäßig nicht gesetzt, kann aber gesetzt werden.Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletCAN.FUNCTION_ENABLE_FRAME_READ_CALLBACK = 3
BrickletCAN.FUNCTION_DISABLE_FRAME_READ_CALLBACK = 4
BrickletCAN.FUNCTION_SET_CONFIGURATION = 6
BrickletCAN.FUNCTION_SET_READ_FILTER = 8
BrickletCAN.FUNCTION_SET_FRAME_READABLE_CALLBACK_CONFIGURATION = 12
- BrickletCAN.SetResponseExpected(functionId, responseExpected)¶
Eingabe: - functionId – Typ: Byte, Wertebereich: Siehe Konstanten
- responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für die Funktion mit der angegebenen Funktion IDs. Diese Flag kann nur für Setter-Funktionen (Standardwert: false) und Konfigurationsfunktionen für Callbacks (Standardwert: true) geändert werden. Für Getter-Funktionen ist das Flag immer gesetzt.
Wenn das Response-Expected-Flag für eine Setter-Funktion gesetzt ist, können Timeouts und andere Fehlerfälle auch für Aufrufe dieser Setter-Funktion detektiert werden. Das Gerät sendet dann eine Antwort extra für diesen Zweck. Wenn das Flag für eine Setter-Funktion nicht gesetzt ist, dann wird keine Antwort vom Gerät gesendet und Fehler werden stillschweigend ignoriert, da sie nicht detektiert werden können.
Die folgenden Konstanten sind für diese Funktion verfügbar:
Für functionId:
BrickletCAN.FUNCTION_ENABLE_FRAME_READ_CALLBACK = 3
BrickletCAN.FUNCTION_DISABLE_FRAME_READ_CALLBACK = 4
BrickletCAN.FUNCTION_SET_CONFIGURATION = 6
BrickletCAN.FUNCTION_SET_READ_FILTER = 8
BrickletCAN.FUNCTION_SET_FRAME_READABLE_CALLBACK_CONFIGURATION = 12
- BrickletCAN.SetResponseExpectedAll(responseExpected)¶
Eingabe: - responseExpected – Typ: Boolean
Ändert das Response-Expected-Flag für alle Setter-Funktionen und Konfigurationsfunktionen für Callbacks diese Gerätes.
Konstanten¶
- BrickletCAN.DEVICE_IDENTIFIER¶
Diese Konstante wird verwendet um ein CAN Bricklet zu identifizieren.
Die
GetIdentity()Funktion und derIPConnection.EnumerateCallbackCallback der IP Connection haben eindeviceIdentifierParameter um den Typ des Bricks oder Bricklets anzugeben.
- BrickletCAN.DEVICE_DISPLAY_NAME¶
Diese Konstante stellt den Anzeigenamen eines CAN Bricklet dar.