- Getting Started
- Hardware
- Software
- Brick Daemon (brickd)
- Brick Viewer (brickv)
- Brick Logger
- API Bindings
- C/C++
- C/C++ (iOS)
- C/C++ for Microcontrollers
- C#
- C# (Windows Phone)
- Delphi/Lazarus
- Requirements
- Installation
- Testing an Example
- API Reference and Examples
- IP Connection
- Bricks
- Bricks (Discontinued)
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Bricklets (Discontinued)
- Go
- Java
- Java (Android)
- JavaScript
- LabVIEW
- Mathematica
- MATLAB/Octave
- MQTT
- openHAB
- Perl
- PHP
- Python
- Ruby
- Rust
- Shell
- Visual Basic .NET
- ESP32 Firmware
- APT Repository
- Device Identifier
- Source Code and Bug Tracking
- Programming Interface
- Kits
- Embedded Boards
- Specifications
Delphi/Lazarus - Tilt Bricklet¶
This is the description of the Delphi/Lazarus API bindings for the Tilt Bricklet. General information and technical specifications for the Tilt Bricklet are summarized in its hardware description.
An installation guide for the Delphi/Lazarus API bindings is part of their general description.
Examples¶
The example code below is Public Domain (CC0 1.0).
Simple¶
1program ExampleSimple;
2
3{$ifdef MSWINDOWS}{$apptype CONSOLE}{$endif}
4{$ifdef FPC}{$mode OBJFPC}{$H+}{$endif}
5
6uses
7 SysUtils, IPConnection, BrickletTilt;
8
9type
10 TExample = class
11 private
12 ipcon: TIPConnection;
13 t: TBrickletTilt;
14 public
15 procedure Execute;
16 end;
17
18const
19 HOST = 'localhost';
20 PORT = 4223;
21 UID = 'XYZ'; { Change XYZ to the UID of your Tilt Bricklet }
22
23var
24 e: TExample;
25
26procedure TExample.Execute;
27var state: byte;
28begin
29 { Create IP connection }
30 ipcon := TIPConnection.Create;
31
32 { Create device object }
33 t := TBrickletTilt.Create(UID, ipcon);
34
35 { Connect to brickd }
36 ipcon.Connect(HOST, PORT);
37 { Don't use device before ipcon is connected }
38
39 { Get current tilt state }
40 state := t.GetTiltState;
41
42 if (state = BRICKLET_TILT_TILT_STATE_CLOSED) then begin
43 WriteLn('Tilt State: Closed');
44 end
45 else if (state = BRICKLET_TILT_TILT_STATE_OPEN) then begin
46 WriteLn('Tilt State: Open');
47 end
48 else if (state = BRICKLET_TILT_TILT_STATE_CLOSED_VIBRATING) then begin
49 WriteLn('Tilt State: Closed Vibrating');
50 end;
51
52 WriteLn('Press key to exit');
53 ReadLn;
54 ipcon.Destroy; { Calls ipcon.Disconnect internally }
55end;
56
57begin
58 e := TExample.Create;
59 e.Execute;
60 e.Destroy;
61end.
Callback¶
Download (ExampleCallback.pas)
1program ExampleCallback;
2
3{$ifdef MSWINDOWS}{$apptype CONSOLE}{$endif}
4{$ifdef FPC}{$mode OBJFPC}{$H+}{$endif}
5
6uses
7 SysUtils, IPConnection, BrickletTilt;
8
9type
10 TExample = class
11 private
12 ipcon: TIPConnection;
13 t: TBrickletTilt;
14 public
15 procedure TiltStateCB(sender: TBrickletTilt; const state: byte);
16 procedure Execute;
17 end;
18
19const
20 HOST = 'localhost';
21 PORT = 4223;
22 UID = 'XYZ'; { Change XYZ to the UID of your Tilt Bricklet }
23
24var
25 e: TExample;
26
27{ Callback procedure for tilt state callback }
28procedure TExample.TiltStateCB(sender: TBrickletTilt; const state: byte);
29begin
30 if (state = BRICKLET_TILT_TILT_STATE_CLOSED) then begin
31 WriteLn('Tilt State: Closed');
32 end
33 else if (state = BRICKLET_TILT_TILT_STATE_OPEN) then begin
34 WriteLn('Tilt State: Open');
35 end
36 else if (state = BRICKLET_TILT_TILT_STATE_CLOSED_VIBRATING) then begin
37 WriteLn('Tilt State: Closed Vibrating');
38 end;
39end;
40
41procedure TExample.Execute;
42begin
43 { Create IP connection }
44 ipcon := TIPConnection.Create;
45
46 { Create device object }
47 t := TBrickletTilt.Create(UID, ipcon);
48
49 { Connect to brickd }
50 ipcon.Connect(HOST, PORT);
51 { Don't use device before ipcon is connected }
52
53 { Enable tilt state callback }
54 t.EnableTiltStateCallback;
55
56 { Register tilt state callback to procedure TiltStateCB }
57 t.OnTiltState := {$ifdef FPC}@{$endif}TiltStateCB;
58
59 WriteLn('Press key to exit');
60 ReadLn;
61 ipcon.Destroy; { Calls ipcon.Disconnect internally }
62end;
63
64begin
65 e := TExample.Create;
66 e.Execute;
67 e.Destroy;
68end.
API¶
Since Delphi does not support multiple return values directly, we use the
out keyword to return multiple values from a function.
All functions and procedures listed below are thread-safe.
Basic Functions¶
- constructor TBrickletTilt.Create(const uid: string; ipcon: TIPConnection)¶
Parameters: - uid – Type: string
- ipcon – Type: TIPConnection
Returns: - tilt – Type: TBrickletTilt
Creates an object with the unique device ID
uid:tilt := TBrickletTilt.Create('YOUR_DEVICE_UID', ipcon);
This object can then be used after the IP Connection is connected.
- function TBrickletTilt.GetTiltState: byte¶
Returns: - state – Type: byte, Range: See constants
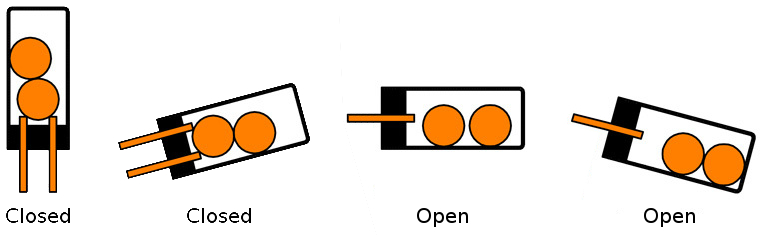
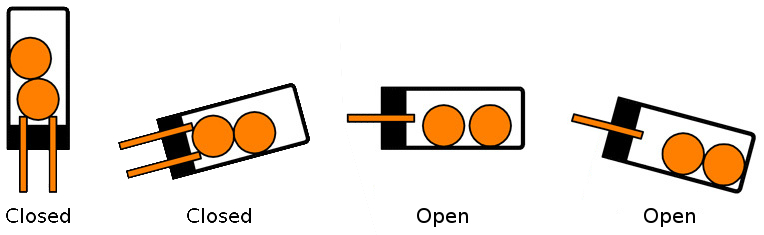
Returns the current tilt state. The state can either be
0 = Closed: The ball in the tilt switch closes the circuit.
1 = Open: The ball in the tilt switch does not close the circuit.
2 = Closed Vibrating: The tilt switch is in motion (rapid change between open and close).
The following constants are available for this function:
For state:
BRICKLET_TILT_TILT_STATE_CLOSED = 0
BRICKLET_TILT_TILT_STATE_OPEN = 1
BRICKLET_TILT_TILT_STATE_CLOSED_VIBRATING = 2
Advanced Functions¶
- procedure TBrickletTilt.GetIdentity(out uid: string; out connectedUid: string; out position: char; out hardwareVersion: array [0..2] of byte; out firmwareVersion: array [0..2] of byte; out deviceIdentifier: word)¶
Output Parameters: - uid – Type: string, Length: up to 8
- connectedUid – Type: string, Length: up to 8
- position – Type: char, Range: ['a' to 'h', 'z']
- hardwareVersion – Type: array [0..2] of byte
- 0: major – Type: byte, Range: [0 to 255]
- 1: minor – Type: byte, Range: [0 to 255]
- 2: revision – Type: byte, Range: [0 to 255]
- firmwareVersion – Type: array [0..2] of byte
- 0: major – Type: byte, Range: [0 to 255]
- 1: minor – Type: byte, Range: [0 to 255]
- 2: revision – Type: byte, Range: [0 to 255]
- deviceIdentifier – Type: word, Range: [0 to 216 - 1]
Returns the UID, the UID where the Bricklet is connected to, the position, the hardware and firmware version as well as the device identifier.
The position can be 'a', 'b', 'c', 'd', 'e', 'f', 'g' or 'h' (Bricklet Port). A Bricklet connected to an Isolator Bricklet is always at position 'z'.
The device identifier numbers can be found here. There is also a constant for the device identifier of this Bricklet.
Callback Configuration Functions¶
- procedure TBrickletTilt.EnableTiltStateCallback¶
Enables the
OnTiltStatecallback.
- procedure TBrickletTilt.DisableTiltStateCallback¶
Disables the
OnTiltStatecallback.
- function TBrickletTilt.IsTiltStateCallbackEnabled: boolean¶
Returns: - enabled – Type: boolean, Default: false
Returns true if the
OnTiltStatecallback is enabled.
Callbacks¶
Callbacks can be registered to receive time critical or recurring data from the device. The registration is done by assigning a procedure to an callback property of the device object:
procedure TExample.MyCallback(sender: TBrickletTilt; const value: longint); begin WriteLn(Format('Value: %d', [value])); end; tilt.OnExample := {$ifdef FPC}@{$endif}example.MyCallback;
The available callback properties and their parameter types are described below.
Note
Using callbacks for recurring events is always preferred compared to using getters. It will use less USB bandwidth and the latency will be a lot better, since there is no round trip time.
- property TBrickletTilt.OnTiltState¶
procedure(sender: TBrickletTilt; const state: byte) of object;
Callback Parameters: - sender – Type: TBrickletTilt
- state – Type: byte, Range: See constants
This callback provides the current tilt state. It is called every time the state changes.
See
GetTiltStatefor a description of the states.The following constants are available for this function:
For state:
BRICKLET_TILT_TILT_STATE_CLOSED = 0
BRICKLET_TILT_TILT_STATE_OPEN = 1
BRICKLET_TILT_TILT_STATE_CLOSED_VIBRATING = 2
Virtual Functions¶
Virtual functions don't communicate with the device itself, but operate only on the API bindings device object. They can be called without the corresponding IP Connection object being connected.
- function TBrickletTilt.GetAPIVersion: array [0..2] of byte¶
Output Parameters: - apiVersion – Type: array [0..2] of byte
- 0: major – Type: byte, Range: [0 to 255]
- 1: minor – Type: byte, Range: [0 to 255]
- 2: revision – Type: byte, Range: [0 to 255]
Returns the version of the API definition implemented by this API bindings. This is neither the release version of this API bindings nor does it tell you anything about the represented Brick or Bricklet.
- function TBrickletTilt.GetResponseExpected(const functionId: byte): boolean¶
Parameters: - functionId – Type: byte, Range: See constants
Returns: - responseExpected – Type: boolean
Returns the response expected flag for the function specified by the function ID parameter. It is true if the function is expected to send a response, false otherwise.
For getter functions this is enabled by default and cannot be disabled, because those functions will always send a response. For callback configuration functions it is enabled by default too, but can be disabled by
SetResponseExpected. For setter functions it is disabled by default and can be enabled.Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BRICKLET_TILT_FUNCTION_ENABLE_TILT_STATE_CALLBACK = 2
BRICKLET_TILT_FUNCTION_DISABLE_TILT_STATE_CALLBACK = 3
- procedure TBrickletTilt.SetResponseExpected(const functionId: byte; const responseExpected: boolean)¶
Parameters: - functionId – Type: byte, Range: See constants
- responseExpected – Type: boolean
Changes the response expected flag of the function specified by the function ID parameter. This flag can only be changed for setter (default value: false) and callback configuration functions (default value: true). For getter functions it is always enabled.
Enabling the response expected flag for a setter function allows to detect timeouts and other error conditions calls of this setter as well. The device will then send a response for this purpose. If this flag is disabled for a setter function then no response is sent and errors are silently ignored, because they cannot be detected.
The following constants are available for this function:
For functionId:
BRICKLET_TILT_FUNCTION_ENABLE_TILT_STATE_CALLBACK = 2
BRICKLET_TILT_FUNCTION_DISABLE_TILT_STATE_CALLBACK = 3
- procedure TBrickletTilt.SetResponseExpectedAll(const responseExpected: boolean)¶
Parameters: - responseExpected – Type: boolean
Changes the response expected flag for all setter and callback configuration functions of this device at once.
Constants¶
- const BRICKLET_TILT_DEVICE_IDENTIFIER¶
This constant is used to identify a Tilt Bricklet.
The
GetIdentityfunction and theTIPConnection.OnEnumeratecallback of the IP Connection have adeviceIdentifierparameter to specify the Brick's or Bricklet's type.
- const BRICKLET_TILT_DEVICE_DISPLAY_NAME¶
This constant represents the human readable name of a Tilt Bricklet.