In the last few days we added some of the most wanted new APIs for the existing Bricks and Bricklets, including:
get_chip_temperature (temperature of microcontroller, available on all Bricks).
reset (Software reset of microcontroller and stack, available on all Bricks).
monoflop (Dual Relay Bricklet).
USB Hotplug (It is now possible to plug in a USB connector in a stack that is already powered by a Step-Down Power Supply, the stack will restart and register on the PC).
Minimum period of 1us on Servo Brick (was 2000us before).
configurable time base for Stepper Brick (you can now do something like one step each 2.5 seconds).
get_all_data/ all data callback (To get all important Stepper Brick messages together).
new_state callback (This will notify you if a new state is reached, e.g. if the full velocity of the Stepper Motor is reached).
And lots of small fixes in the Brick Viewer.
You can find all of the changes and links to the new versions on our announcements thread on tinkerunity.
After a lot of back and forth (we changed the protocol two times) the RS485 Extension now uses Modbus RTU as the protocol on the RS485 interface. This isn’t the most efficient protocol for our data packages, but Modbus is widely used in home automation and industry. There are e.g. gateways that can transform between Modbus and TCP/IP. Thus it is now possible to use the RS485 Extension in an existing Modbus network. It is also possible to communicate directly with RS485 stack via Modbus, similar as it is already possible with TCP/IP (documentation for this is still work in progress). For this we added the option to configure the baud rate, parity and stop bits.
The default configuration has a baud rate of 2Mbit. This is faster than the USB 1.1 connection, therefore the RS485 bus won’t be a bottleneck in your system! If you have a big RS485 bus and you get timeouts and the CRC error counter is rising rapidly, you should try to decrease the baud rate.
To make the installation of many small RS485 stacks as easy as possible, we added a USB Power Supply to our shop.
This power supply can’t be used to operate motors (DC, Stepper, Servo), but it is perfectly suitable for small RS485 slave stacks!
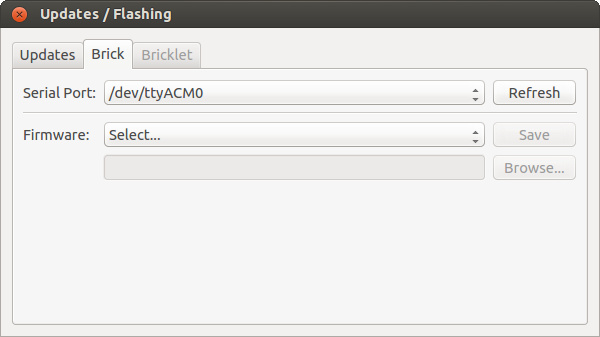
We released a new Brick Viewer version. With the new version it is possible to not only flash Bricklets, but also Bricks. This is now done automatically from our server, there is no need to download a suitable firmware by hand.
This means that SAM-BA as a third-party tool is not required anymore. It seemed that the Atmel tool made lots of trouble and there was no Mac OS X version. Furthermore we reimplemented some stuff to reduce dependencies. The Brick Viewer now doesn’t depend on pylab, scipy and matplotlib anymore, this should make the installation on embedded devices and small Linux distributions quite a bit easier.
Phew! Yesterday evening/night we packed most of the IMU Brick orders, the shipment email should have already been send too.
We are sorry for the long delay! In the future we will make a product that is produced in big numbers for the first time only avaiable in the shop after we have it here and tested. The gyroscope/accelerometer/magnetometer ICs use a Quad Flat No Leads Package (QFN). This means that the pads are below the chip. It is not possible to see solder straps via a visual inspection. For this reason we had problems that lead to more delays (the IMU Bricks had to be X-rayed).
All IMU Brick orders that don’t include a Dual Relay Bricklet should be marked as shipped. We did run short of them unexpectedly yesterday. But that is no big problem, a big batch of new ones are already on there way und they should arrive in the evening today.
With the automatic calibration we had problems to subtract out the magnetic field of the servo motors (this is definitely possible und we will do that in the future). To assure that there aren’t more delays we did calibrate the magnetometers of the first 250 IMUs by hand. The precision did likely suffer, but the magnetometer has to be newly calibrated in most use cases anyway (if the IMU i used near a motor or similar).
And now the announced video:
The hardware is completely based on Sebastian O.H. Madgwick published “gimbal components”. The servo motors and brackets are from servo city and the controlling is of course done with a Servo Brick. The code for the calibration can be found in the IMU Brick git.