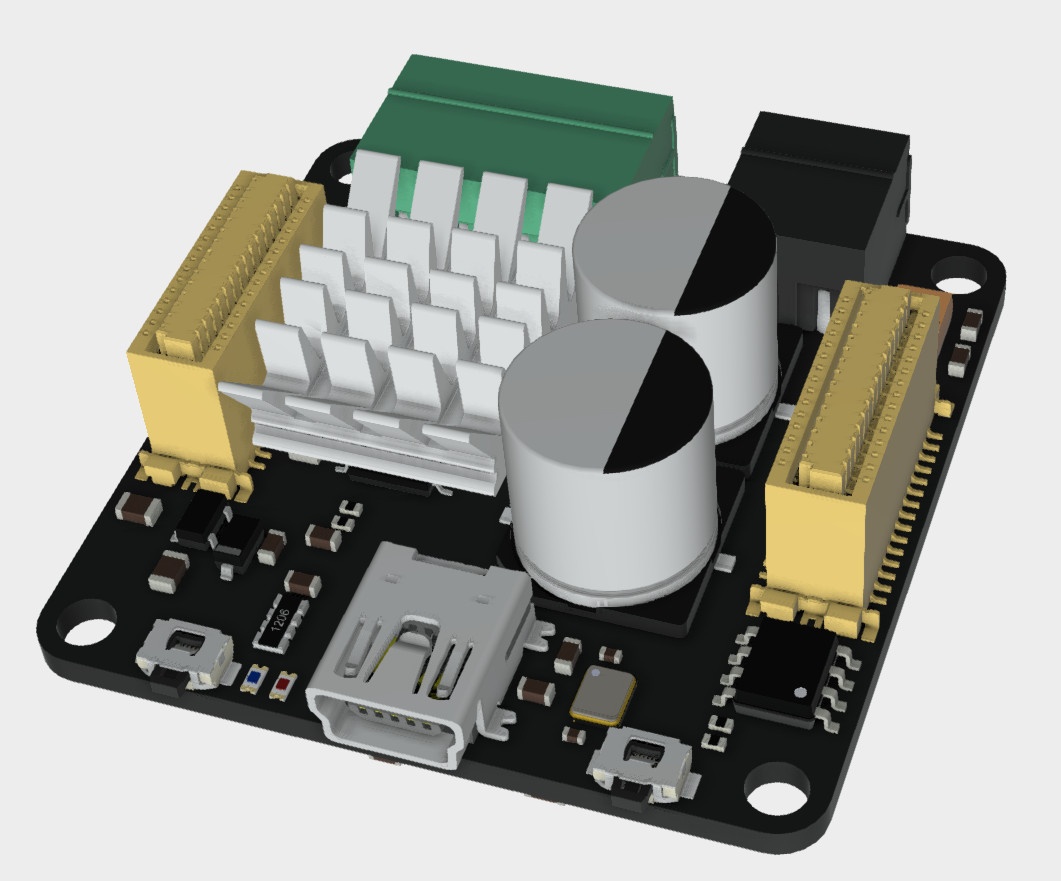
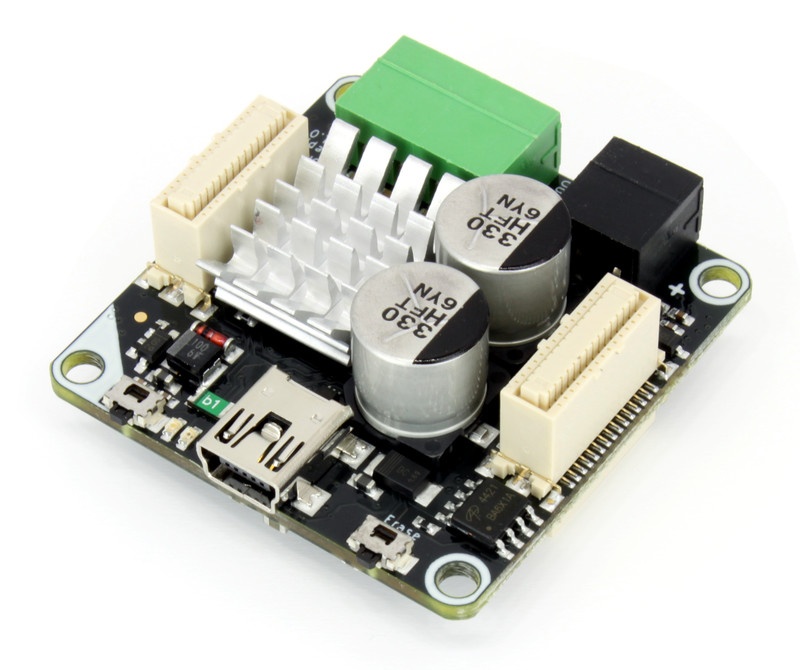
After a long development phase we can finally release the new Silent Stepper Brick.
So far only the Stepper Brick was able to controller stepper motors. With the Silent Stepper Brick we offer an alternative to control these motors. Compared to the Stepper Brick, it has a mode to drive stepper motors completely noiseless and it can use a step-resolution as small as 1/256-step.
The Silent Stepper Brick has 3 modes.
- Stealth Mode: Completely noiseless
- Coolstep Mode: Energy optimized
- Classic Mode: Maximized torque
In Stealth Mode the stepper motor is driven nearly noiseless with as little vibrations as possible. The mode is usable for low to medium velocities. In Coolstep Mode the power consumption is automatically reduced during low load times. This ensures that as little heat as necessary is generated. If the maximum torque of a stepper motor is needed, you can switch to classic mode. Classic Mode is very similar to the way the Stepper Brick controls stepper motors.
For these three modes velocity thresholds can be defined. When one of these threshold is reached the Brick changes from one mode into another. Typically this is used to be noiseless in standstill or for low velocities (stealth mode) and to have the maximum torque for high velocity applications (classic mode).
Another feature is Stallguard. It can be used to measure current motor load and for stall detection. In Coolstep Mode this is used automatically to adjust the motor current to the load.
With a small step size like 1/256-step you can drive a stepper motor extremely smooth and precise. If you want to reach high speeds, like 10000 full-steps per second, a step-size of 1/256 would result in a velocity of 2,560,000 steps per second. It is not possible to precisely trigger steps with a frequency that high. We limit the steps to a maximum of 65535 steps per second. However, you can enable step-interpolation. With step-interpolation enabled, you can drive a motor with 10000 full-steps per second and the driver will internally drive every step with 1/256 sub steps, which is the equivalent to the full 2,560,000 1/256-steps.
The Silent Stepper Brick is now available in our shop for 59.99€ including VAT.
We also made a small noise comparison video: