- Getting Started
- Hardware
- Bricks
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- Breakout Bricklet
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Master Extensions
- Power Supplies
- Discontinued Products
- Timeline
- Software
- Kits
- Embedded Boards
- Specifications
IMU Bricklet 3.0¶

Features¶
Full fledged IMU/AHRS with 9 degrees of freedom (3-axis each: accelerometer, compass, gyroscope)
No accumulating errors, no gimbal lock!
Factory calibrated, automatic continuous self-calibration during operation
Calculates quaternions, linear acceleration, gravity vector as well as independent heading, roll and pitch angles
Description¶
The IMU Bricklet 3.0 offers the same functionality and performance as the IMU Brick 2.0, but in the form-factor of a Bricklet.
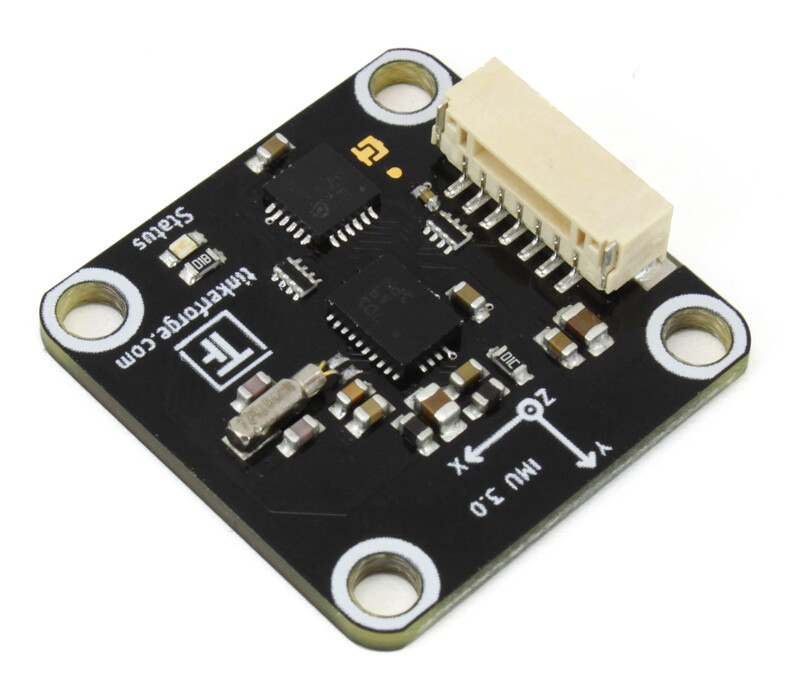
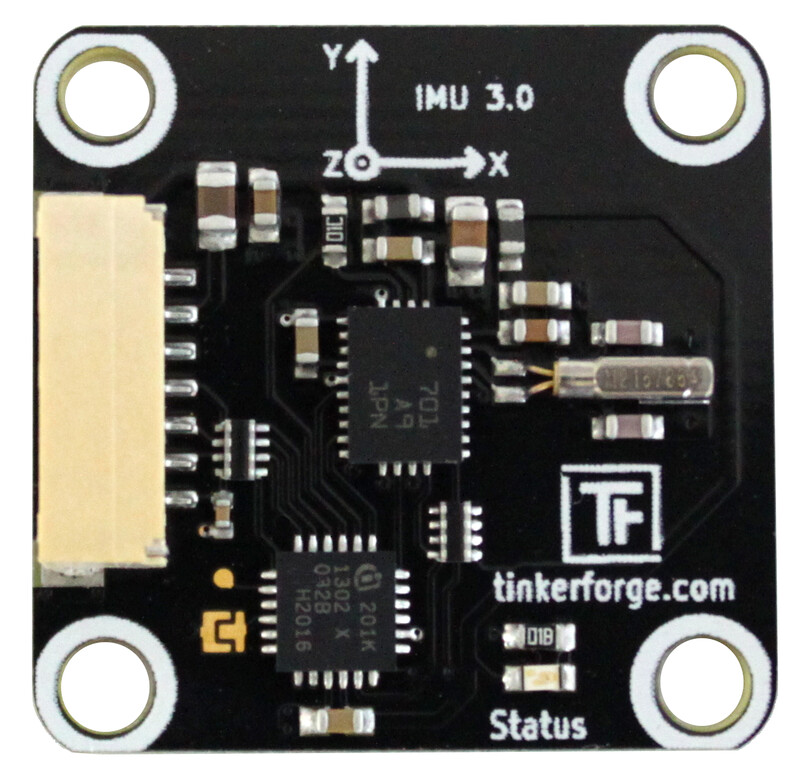
The IMU Bricklet 3.0 is equipped with a 3-axis accelerometer, magnetometer (compass) and gyroscope and works as inertial measurement unit. It can measure 9 degrees of freedom and computes quaternions, linear acceleration, gravity vector as well as independent heading, roll and pitch angles. It is a complete attitude and heading reference system.
{kind=link}
The API, provided for many programming languages, allows access to the calculated data and also the acceleration, magnetic field and angular velocity of the three axes. If the quaternion representation is used, the IMU Bricklet 3.0 does not have a gimbal lock, as known from Euler angles.
Technical Specifications¶
Property |
Value |
|---|---|
Sensor |
BNO055 |
Current Consumption |
95mW (19mA at 5V) |
Acceleration, Magnetic, Angular Velocity Resolution |
14bit, 16bit, 16bit |
Heading, Roll, Pitch Resolution |
0.0625° steps |
Quaternion Resolution |
16bit |
Sampling Rate |
100Hz |
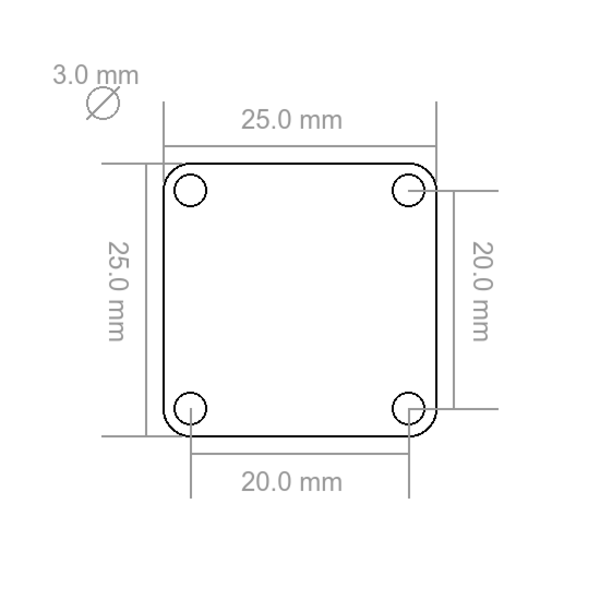
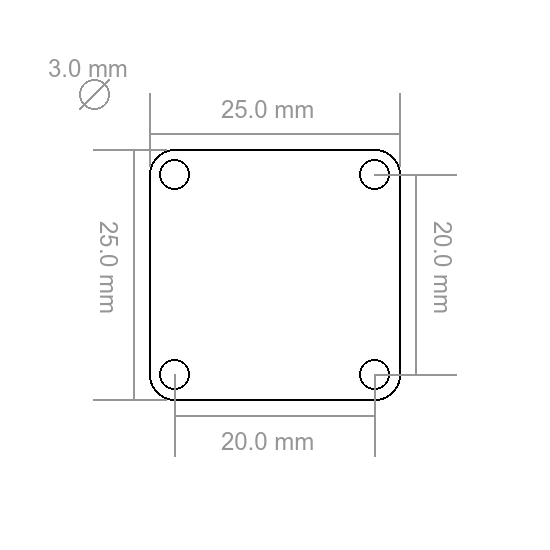
Dimensions (W x D x H) |
25 x 25 x 5mm (0.98 x 0.98 x 0.19") |
Weight |
3g |
Resources¶
{kind=link}
Test your IMU Bricklet 3.0¶
To test a IMU Bricklet 3.0 you need to have Brick Daemon and Brick Viewer installed. Brick Daemon acts as a proxy between the USB interface of the Bricks and the API bindings. Brick Viewer connects to Brick Daemon. It helps to figure out basic information about the connected Bricks and Bricklets and allows to test them.
Connect the IMU Bricklet 3.0 to a Brick with a Bricklet Cable.
If you connect the Brick to the PC over USB, you should see a new tab named "IMU Bricklet 3.0" in the Brick Viewer after a moment. Select this tab.
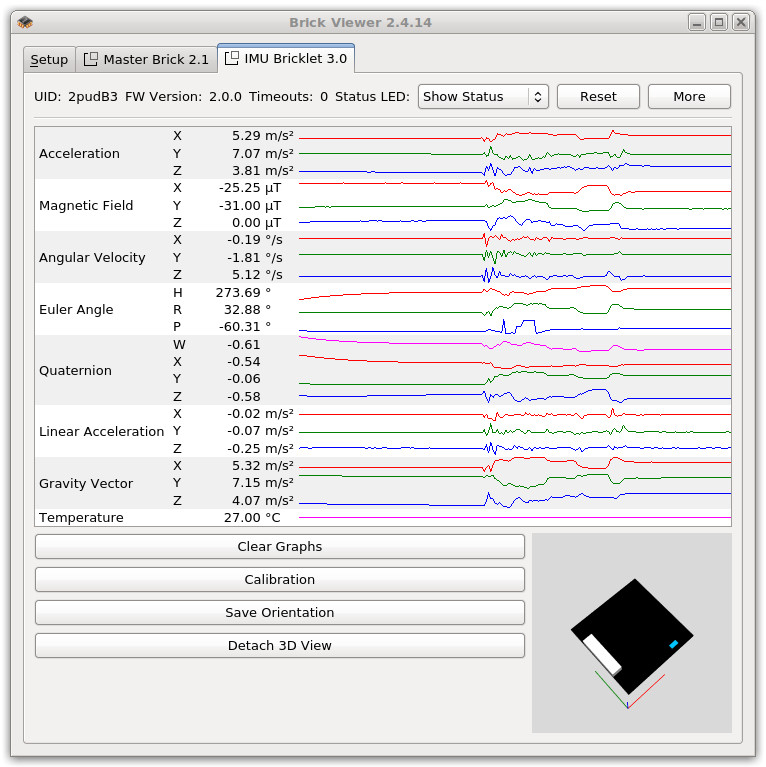
You can see all of the available data form the IMU Bricklet 3.0. If you hold the IMU Bricklet 3.0 in the orientation as shown in the image and press "Save Orientation", the movements that you make with the IMU Bricklet 3.0 should be mirrored in the Brick Viewer.
After this test you can go on with writing your own application. See the Programming Interface section for the API of the IMU Bricklet 3.0 and examples in different programming languages.
Calibration¶
The IMU Bricklet 3.0 does continuous self-calibration during usage. It is not necessary to start a specific manual calibration process. The IMU can store the calibration data to speed-up the self-calibration after each restart. This data is initialized at the factory.
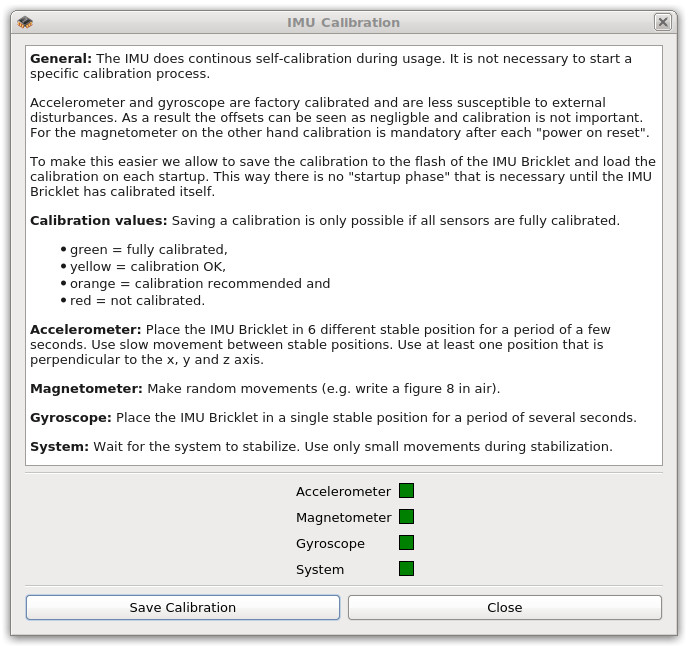
Click the "Calibration" button in Brick Viewer to see the current continuous self-calibration status. The dialog also allows to update the saved calibration data.
Case¶
A laser-cut case for the IMU Bricklet 3.0 is available.
The assembly is easiest if you follow the following steps:
Screw spacers to the Bricklet,
screw bottom plate to bottom spacers,
build up side plates,
plug side plates into bottom plate and
screw top plate to top spacers.
Below you can see an exploded assembly drawing of the IMU Bricklet 3.0 case:
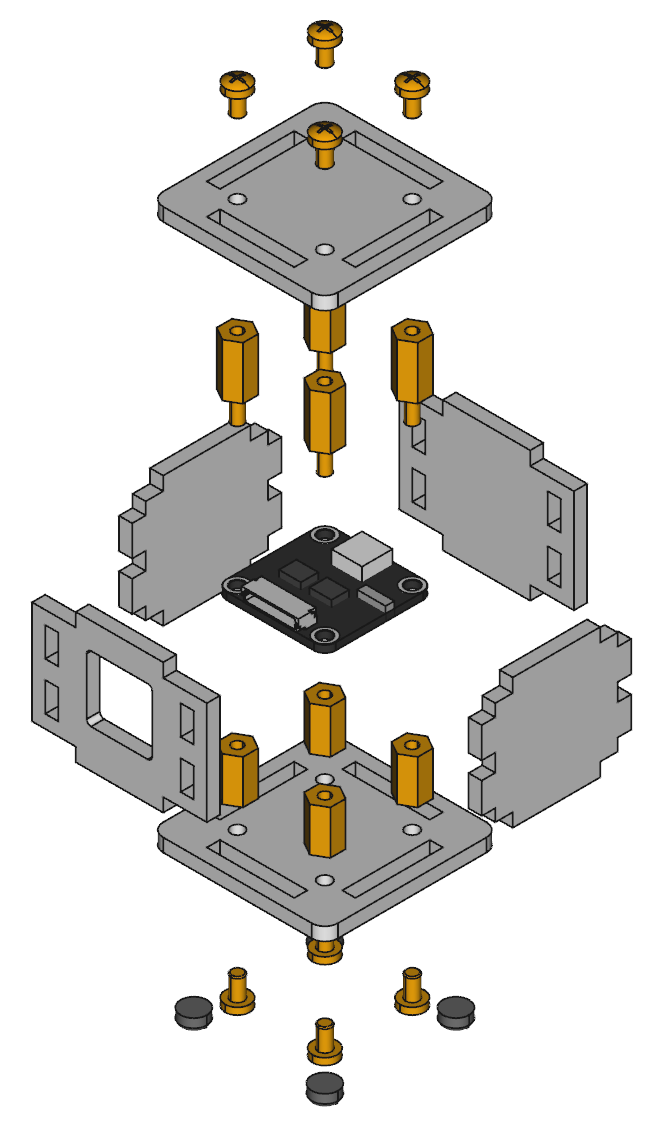
Hint: There is a protective film on both sides of the plates, you have to remove it before assembly.
Programming Interface¶
See Programming Interface for a detailed description.
Language |
API |
Examples |
Installation |
|---|---|---|---|
C/C++ |
|||
C/C++ for Microcontrollers |
|||
C# |
|||
Delphi/Lazarus |
|||
Go |
|||
Java |
|||
JavaScript |
|||
LabVIEW |
|||
Mathematica |
|||
MATLAB/Octave |
|||
MQTT |
|||
openHAB |
|||
Perl |
|||
PHP |
|||
Python |
|||
Ruby |
|||
Rust |
|||
Shell |
|||
Visual Basic .NET |
|||
TCP/IP |
|||
Modbus |