- Einstieg
- Hardware
- Bricks
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- Breakout Bricklet
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Master Extensions
- Stromversorgungen
- Abgekündigte Produkte
- Timeline
- Software
- Kits
- Embedded Boards
- Spezifikationen
IMU Bricklet 3.0¶

Features¶
Voll ausgestattete IMU/AHRS mit 9 Freiheitsgraden (je 3-Achsen Beschleunigungssensor, Kompass, Gyroskop)
Keine akkumulierenden Fehler, kein Gimbal Lock!
Werkskalibriert, automatische durchgehende Selbstkalibrierung während des Betriebs
Berechnet Quaternionen, lineare Beschleunigung, Schwerkraftvektor sowie unabhängige Gier- (Heading), Roll- und Nick- (Pitch) Winkel
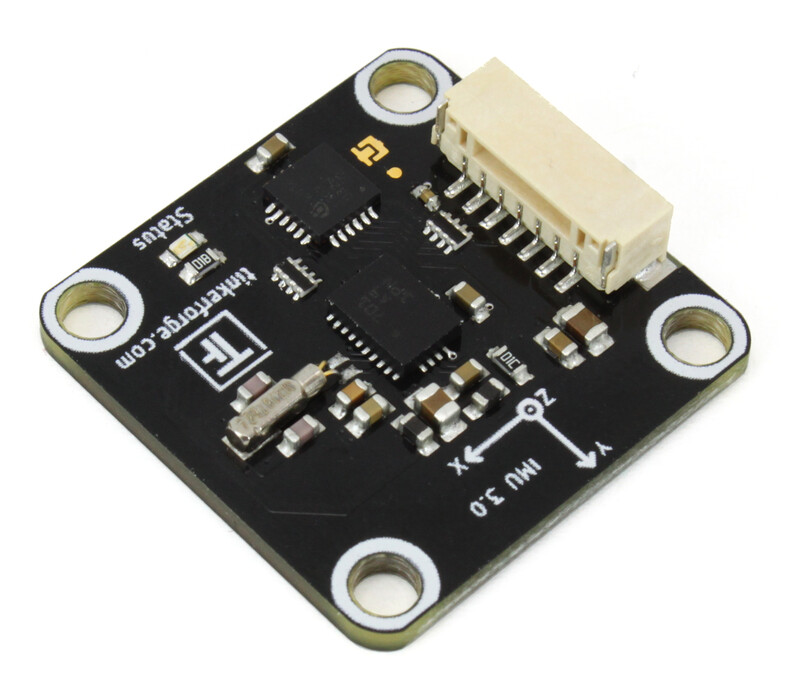
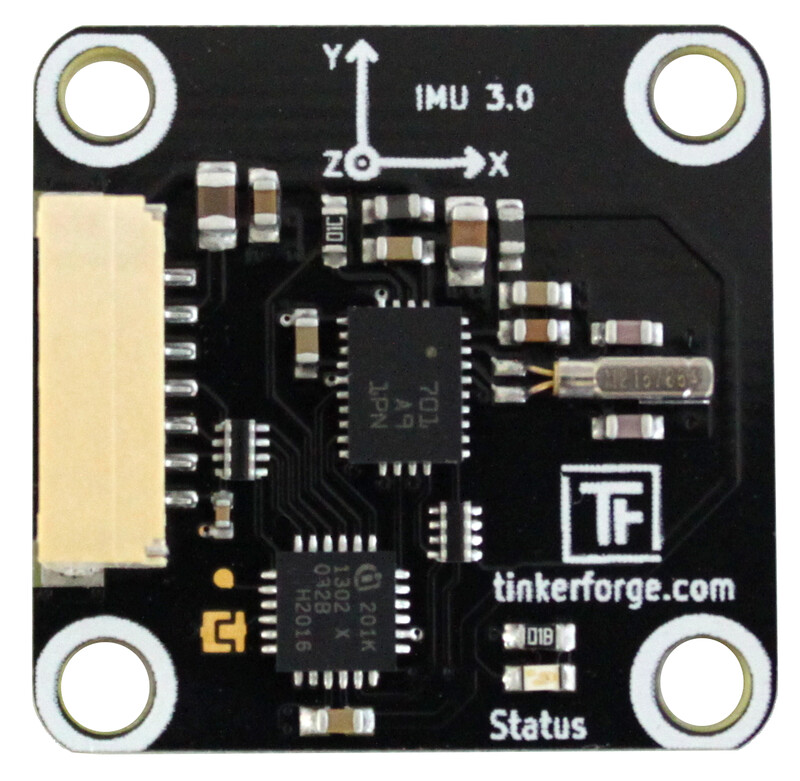
Beschreibung¶
Das IMU Bricklet 3.0 bietet die gleiche Funktionalität wie das IMU Brick 2.0, allerdings im Formfaktor eines Bricklets.
Das IMU Bricklet 3.0 ist mit je einem 3-Achsen Beschleunigungssensor, Magnetfeldsensor (Kompass) und Gyroskop ausgestattet und arbeitet als Inertialsensor. Dieser kann 9 Freiheitsgrade messen und berechnet Quaternionen sowie auch unabhängige Gier-, Roll- und Nick-Winkel. Es ist ein vollständiges Attitude and Heading Reference System.
Die API, verfügbar für viele Programmiersprachen, erlaubt den Zugriff auf die berechneten Daten sowie auf die Beschleunigung, Magnetfeld und Winkelgeschwindigkeiten für die drei Achsen. Wenn die Quaternionen-Darstellung benutzt wird, ist das IMU Bricklet 3.0 Gimbal Lock frei (im Gegensatz zur Euler-Winkel Darstellung).
Technische Spezifikation¶
Eigenschaft |
Wert |
|---|---|
Sensor |
BNO055 |
Stromverbrauch |
95mW (19mA bei 5V) |
Beschleunigungs-, Magnetfeld-, Winkelgeschwindigkeitsauflösung |
14Bit, 16Bit, 16Bit |
Auflösung der Gier- (Heading), Roll-, Nick- (Pitch) Winkel |
0,0625° Schritte |
Quaternionenauflösung |
16Bit |
Abtastrate |
100Hz |
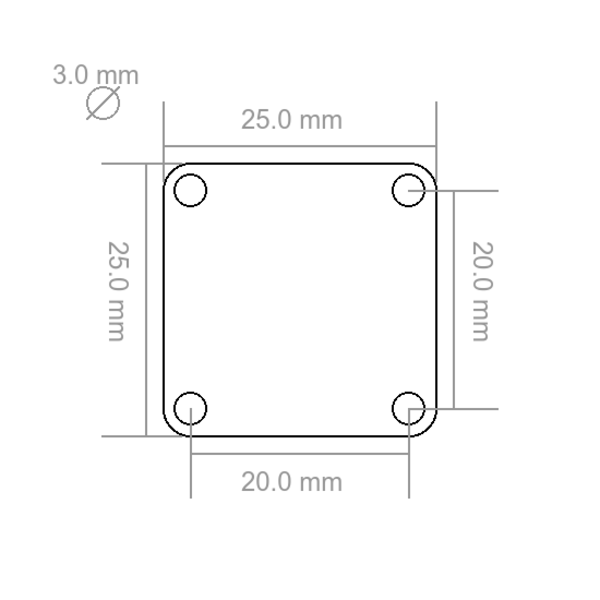
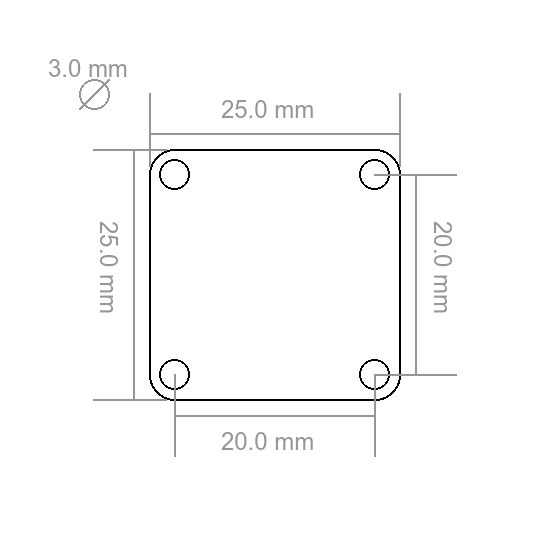
Abmessungen (B x T x H) |
25 x 25 x 5mm (0,98 x 0,98 x 0,19") |
Gewicht |
3g |
Ressourcen¶
{kind=link}
Erster Test¶
Um ein IMU Bricklet 3.0 testen zu können, müssen zuerst Brick Daemon und Brick Viewer installiert werden. Brick Daemon arbeitet als Proxy zwischen der USB Schnittstelle der Bricks und den API Bindings. Brick Viewer kann sich mit Brick Daemon verbinden, gibt Informationen über die angeschlossenen Bricks und Bricklets aus und ermöglicht es diese zu testen.
Als nächstes muss das IMU Bricklet 3.0 mittels eines Bricklet Kabels mit einem Brick verbunden werden.
Wenn der Brick per USB an den PC angeschlossen wird sollte einen Moment später im Brick Viewer ein neuer Tab namens "IMU Bricklet 3.0" auftauchen. Wähle diesen Tab aus.
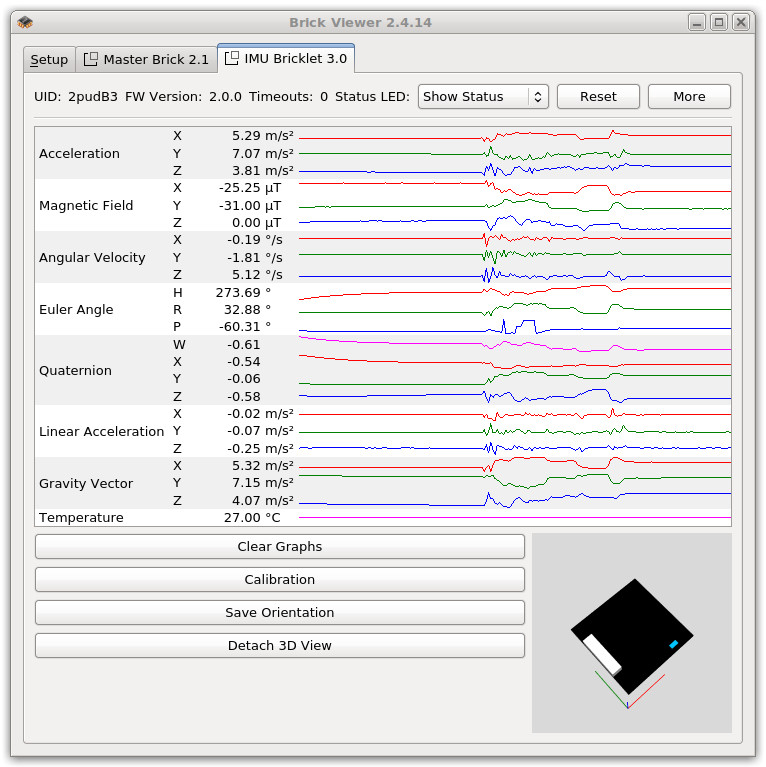
Alle verfügbaren Daten des IMU Bricklets 3.0 werden angezeigt. Wenn das IMU Bricklet 3.0 wie dargestellt gehalten und dann der "Save Orientation" Knopf geklickt wird sollten die Bewegungen des IMU Bricks entsprechend im Brick Viewer widergespiegelt werden.
Nun kann ein eigenes Programm geschrieben werden. Der Abschnitt Programmierschnittstelle listet die API des IMU Bricklet 3.0 und Beispiele in verschiedenen Programmiersprachen auf.
Kalibrierung¶
Das IMU Bricklet 3.0 führt durchgehend eine Selbst-Kalibrierung durch. Es ist nicht notwendig eine gesonderte Kalibrierung von Hand durchzuführen. Die IMU kann die Kalibrierungsdaten speichern, um die Selbst-Kalibrierung nach einem Neustart zu beschleunigen. Diese Kalibrierungsdaten werden bei der Produktion bereits gesetzt.
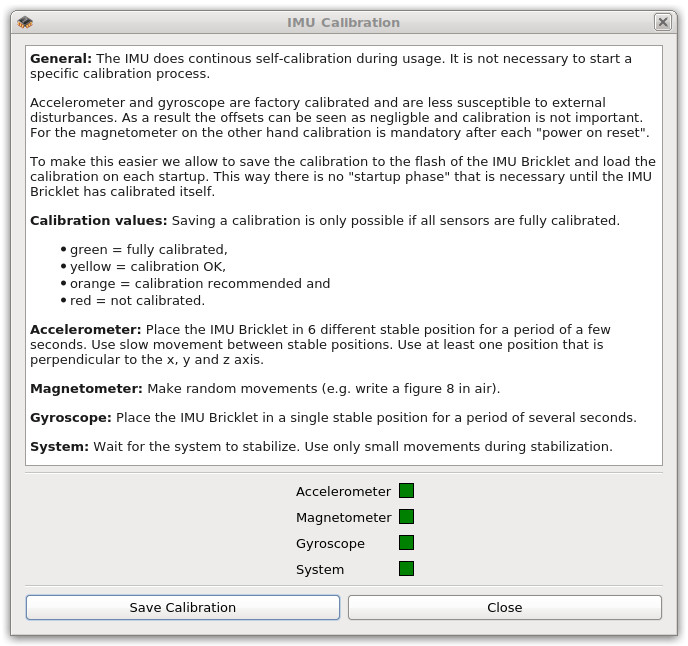
Klicke den "Calibration" Knopf im Brick Viewer, um den aktuellen Zustand der durchgehenden Selbst-Kalibrierung einzusehen. Auf diesem Dialog können auch die gespeicherten Kalibrierungsdaten aktualisiert werden.
Gehäuse¶
Ein laser-geschnittenes Gehäuse für das IMU Bricklet 3.0 ist verfügbar.
Der Aufbau ist am einfachsten wenn die folgenden Schritte befolgt werden:
Schraube Abstandshalter an das Bricklet,
schraube Unterteil an untere Abstandshalter,
baue Seitenteile auf,
stecke zusammengebaute Seitenteile in Unterteil und
schraube Oberteil auf obere Abstandshalter.
Im Folgenden befindet sich eine Explosionszeichnung des IMU Bricklet 3.0 Gehäuses:
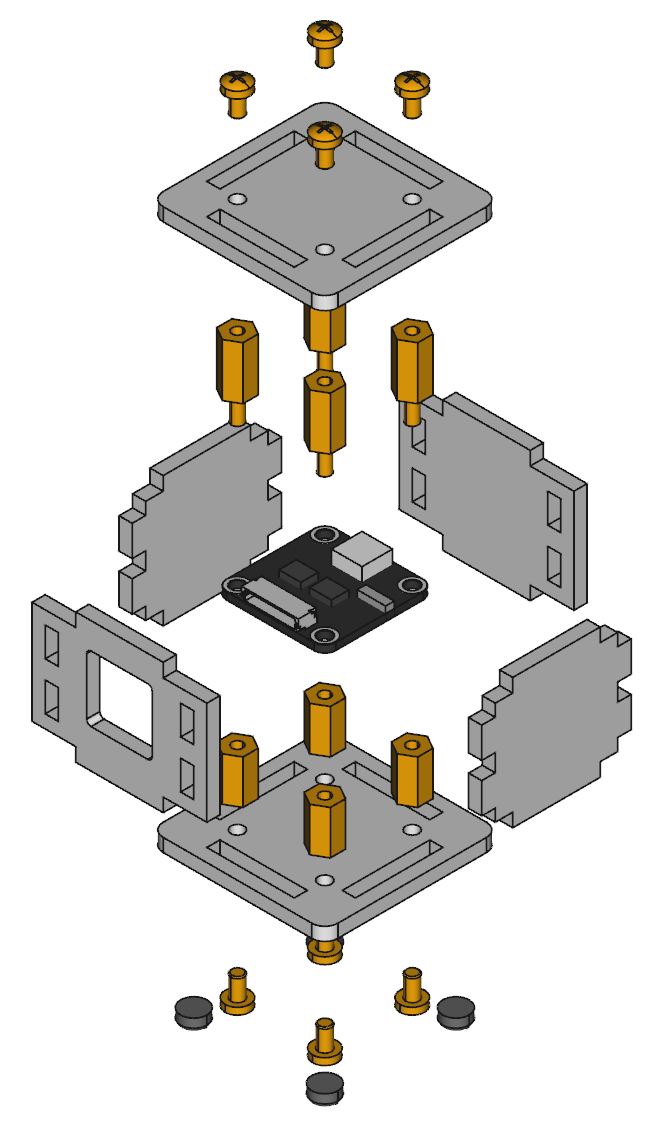
Hinweis: Auf beiden Seiten der Platten ist eine Schutzfolie, diese muss vor dem Zusammenbau entfernt werden.
Programmierschnittstelle¶
Siehe Programmierschnittstelle für eine detaillierte Beschreibung.
Sprache |
API |
Beispiele |
Installation |
|---|---|---|---|
C/C++ |
|||
C/C++ für Mikrocontroller |
|||
C# |
|||
Delphi/Lazarus |
|||
Go |
|||
Java |
|||
JavaScript |
|||
LabVIEW |
|||
Mathematica |
|||
MATLAB/Octave |
|||
MQTT |
|||
openHAB |
|||
Perl |
|||
PHP |
|||
Python |
|||
Ruby |
|||
Rust |
|||
Shell |
|||
Visual Basic .NET |
|||
TCP/IP |
|||
Modbus |