- Einstieg
- Hardware
- Bricks
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- Breakout Bricklet
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Master Extensions
- Stromversorgungen
- Abgekündigte Produkte
- Timeline
- Software
- Kits
- Embedded Boards
- Spezifikationen
DC Bricklet 2.0¶


Features¶
Steuert einen Gleichstrommotor mit max. 28V und 5A (Peak) über USB
API für viele Programmiersprachen verfügbar
Richtung, Geschwindigkeit und Beschleunigung können gesteuert werden
Übertemperatur- und Überstrom-Callbacks konfigurierbar
Beschreibung¶
Mit dem DC Bricklet 2.0 kann ein Gleichstrommotor (max. 28V und 5A (Peak)) gesteuert werden. Eine API für viele Programmiersprachen ermöglicht das Steuern der Richtung, Geschwindigkeit und Beschleunigung des Motors.
Neben Methoden zum Steuern des angeschlossenen Motors bietet die API Möglichkeiten zur Messung des Stromverbrauchs und der Versorgungsspannung. Im Falle einer Überhitzung oder Überspannung können Callbacks ausgelöst werden, so dass auf diese im eigenen Programm reagiert werden kann.
Zusätzlich kann der Fahrmodus zwischen Fahren/Bremsen und Fahren/Leerlauf umgeschaltet werden (siehe Fahrmodus).
Technische Spezifikation¶
Eigenschaft |
Wert |
|---|---|
Stromverbrauch |
50mW (10mA bei 5V) ohne Motor |
Maximaler Motorstrom |
Kurzzeitig: 5A (Peak)
Dauerhaft: > 3A (Abhängig von der Kühlung)
|
Minimale/Maximale Eingangsspannung |
6V/28V |
PWM Frequenz |
Einstellbar, 1-20kHz, Standard 15kHz |
Geschwindigkeit |
-32767 bis 32767, Rückwärts nach Vorwärts, 0=Stopp |
Beschleunigung |
0 bis 65535, Geschwindigkeit/s, Inkrement für Geschwindigkeit/s |
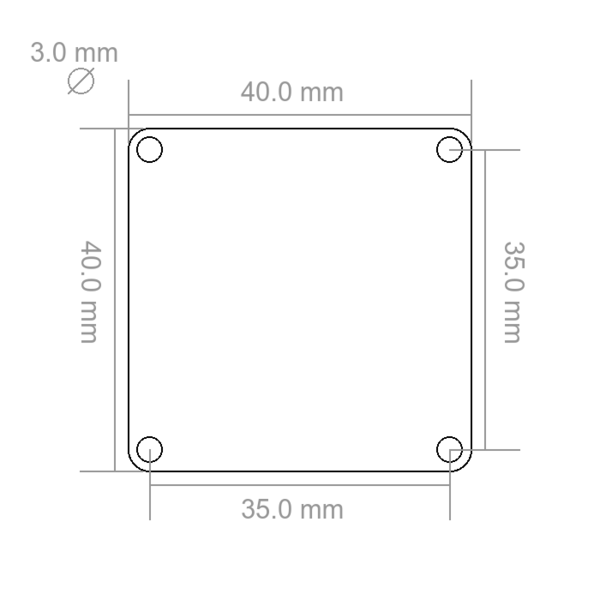
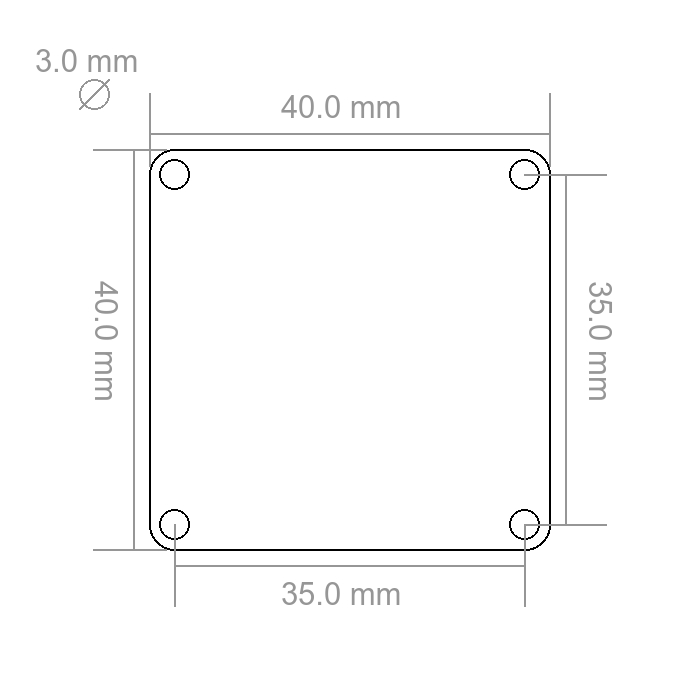
Abmessungen (B x T x H) |
40 x 40 x 15mm (1,57 x 1,57 x 0,59") |
Gewicht |
12g |
Ressourcen¶
{kind=link}
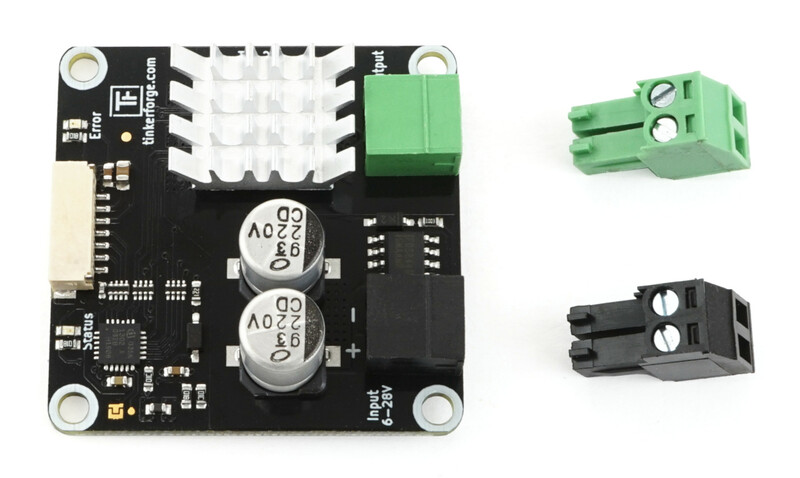
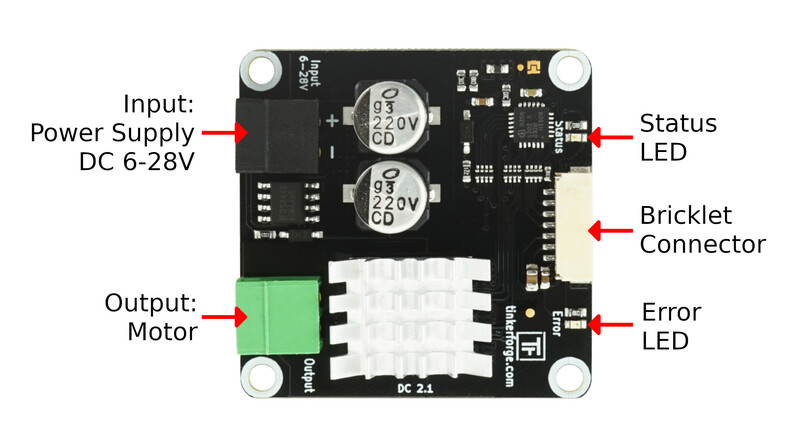
Anschlussmöglichkeit¶
Das folgende Bild zeigt die verschiedenen Anschlussmöglichkeit des DC Bricklet 2.0.
Erster Test¶
Um ein DC Bricklet 2.0 testen zu können, müssen zuerst Brick Daemon und Brick Viewer installiert werden. Brick Daemon arbeitet als Proxy zwischen der USB Schnittstelle der Bricks und den API Bindings. Brick Viewer kann sich mit Brick Daemon verbinden, gibt Informationen über die angeschlossenen Bricks und Bricklets aus und ermöglicht es diese zu testen.
Als nächstes muss das DC Bricklet 2.0 mittels eines Bricklet Kabels mit einem Brick verbunden werden. Schließe einen DC Motor und eine passende Stromversorgung an das Bricklet an.
Wenn der Brick per USB an den PC angeschlossen wird sollte einen Moment später im Brick Viewer ein neuer Tab namens "DC Bricklet 2.0" auftauchen. Wähle diesen Tab aus.
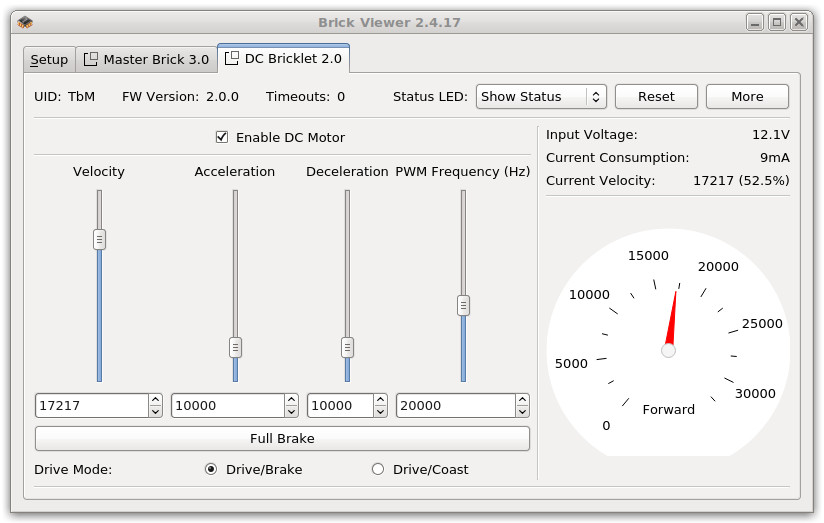
Als erstes muss das Häkchen für "Enable" gesetzt werden, um die Treiberstufe zu aktivieren. Es stehen 4 Regler zur Kontrolle der Geschwindigkeit (vorwärts und rückwärts), der Beschleunigung und der PWM Frequenz zur Verfügung. Letztere wird von der Treiberstufe benutzt, um den angeschlossenen Motor anzusteuern.
Auf der rechten Seite befinden sich Anzeigen für die Spannungen der zwei möglichen Stromversorgung sowie den Stromverbrauch des Motors. Darunter befindet sich eine Tachometer zur Darstellung der Motorgeschwindigkeit.
Unterhalb der Regler befinden sich Knöpfe für "Full Break" und die verschiedenen Fahrmodi (siehe here für weiterführende Information).
Nun kann ein eigenes Programm geschrieben werden. Der Abschnitt Programmierschnittstelle listet die API des DC Bricklet 2.0 und Beispiele in verschiedenen Programmiersprachen auf.
Fahrmodi¶
Es gibt zwei Arten den Motor anzusteuern:
Fahren/Bremsen
In diesem Modus wird der Motor durchgehend angesteuert, entweder wird er gefahren oder gebremst. Es ist kein Freilauf möglich. Dies führt zu einer besseren Korrelation zwischen PWM und Geschwindigkeit, als Vorteil diese Modus. Dadurch kann eine genauere Beschleunigung erzielt werden. Gewöhnliche Motoren können in diesem Modus mit geringeren Geschwindigkeit gefahren werden. Ein Nachteil diese Modus ist der höhere Stromverbrauch wodurch sich die Treiberstufe schneller aufheizt.
Fahren/Leerlauf
In diesem Modus wird der Motor nicht durchgehend angesteuert, entweder wird er gefahren oder ist im Leerlauf. Dies verringert den Stromverbrauch und die Treiberstufe heizt sich nicht so schnell auf. Die Kontrolle über Geschwindigkeit und Beschleunigung ist weniger genau und kann "hinterher hinken".
Error LED¶
Die rote Error-LED hat drei unterschiedliche Zustände:
Aus: Es liegt kein Fehler vor.
1s Intervall-Blinken: Eingangsspannung zu klein (unter 6V).
250ms Intervall-Blinken: Übertemperatur oder Überstrom.
Wenn ein Übertemperatur- oder Überstrom-Event eintritt hört der Motor auf zu laufen und der treiber wird deaktiviert. Um den Treiber wieder zu starten muss dieser explizit mit der Enable-Funktion wieder aktiviert werden.
Gehäuse¶
TBD
Programmierschnittstelle¶
Siehe Programmierschnittstelle für eine detaillierte Beschreibung.
Sprache |
API |
Beispiele |
Installation |
|---|---|---|---|
C/C++ |
|||
C/C++ für Mikrocontroller |
|||
C# |
|||
Delphi/Lazarus |
|||
Go |
|||
Java |
|||
JavaScript |
|||
LabVIEW |
|||
Mathematica |
|||
MATLAB/Octave |
|||
MQTT |
|||
Perl |
|||
PHP |
|||
Python |
|||
Ruby |
|||
Rust |
|||
Shell |
|||
Visual Basic .NET |
|||
TCP/IP |
|||
Modbus |