- Einstieg
- Hardware
- Bricks
- Bricklets
- Accelerometer Bricklet 2.0
- Air Quality Bricklet
- Ambient Light Bricklet 3.0
- Analog In Bricklet 3.0
- Analog Out Bricklet 3.0
- Barometer Bricklet
- Barometer Bricklet 2.0
- Breakout Bricklet
- CAN Bricklet
- CAN Bricklet 2.0
- CO2 Bricklet 2.0
- Color Bricklet
- Color Bricklet 2.0
- Compass Bricklet
- DC Bricklet 2.0
- Distance IR Bricklet
- Distance IR Bricklet 2.0
- Distance US Bricklet 2.0
- DMX Bricklet
- Dual Button Bricklet 2.0
- Dust Detector Bricklet
- E-Paper 296x128 Bricklet
- Energy Monitor Bricklet
- GPS Bricklet 2.0
- GPS Bricklet 3.0
- Hall Effect Bricklet
- Hall Effect Bricklet 2.0
- Humidity Bricklet 2.0
- IMU Bricklet 3.0
- Industrial Analog Out Bricklet 2.0
- Industrial Counter Bricklet
- Industrial Digital In 4 Bricklet 2.0
- Industrial Digital Out 4 Bricklet
- Industrial Digital Out 4 Bricklet 2.0
- Industrial Dual 0-20mA Bricklet
- Industrial Dual 0-20mA Bricklet 2.0
- Industrial Dual AC In Bricklet
- Industrial Dual AC Relay Bricklet
- Industrial Dual Analog In Bricklet 2.0
- Industrial Dual Relay Bricklet
- Industrial PTC Bricklet
- Industrial Quad Relay Bricklet 2.0
- IO-16 Bricklet
- IO-16 Bricklet 2.0
- IO-4 Bricklet 2.0
- Isolator Bricklet
- Joystick Bricklet
- Joystick Bricklet 2.0
- Laser Range Finder Bricklet 2.0
- LCD 128x64 Bricklet
- LCD 20x4 Bricklet
- LED Strip Bricklet 2.0
- Line Bricklet
- Linear Poti Bricklet
- Linear Poti Bricklet 2.0
- Load Cell Bricklet 2.0
- Motion Detector Bricklet 2.0
- Motorized Linear Poti Bricklet
- Multi Touch Bricklet
- Multi Touch Bricklet 2.0
- NFC Bricklet
- OLED 128x64 Bricklet 2.0
- OLED 64x48 Bricklet
- One Wire Bricklet
- Outdoor Weather Bricklet
- Particulate Matter Bricklet
- Performance DC Bricklet
- Piezo Speaker Bricklet
- Piezo Speaker Bricklet 2.0
- Real-Time Clock Bricklet
- Real-Time Clock Bricklet 2.0
- Remote Switch Bricklet 2.0
- RGB LED Bricklet 2.0
- RGB LED Button Bricklet
- Rotary Encoder Bricklet 2.0
- Rotary Poti Bricklet
- Rotary Poti Bricklet 2.0
- RS232 Bricklet
- RS232 Bricklet 2.0
- RS485 Bricklet
- Segment Display 4x7 Bricklet
- Segment Display 4x7 Bricklet 2.0
- Servo Bricklet 2.0
- Silent Stepper Bricklet 2.0
- Solid State Relay Bricklet 2.0
- Sound Intensity Bricklet
- Sound Pressure Level Bricklet
- Temperature Bricklet
- Temperature Bricklet 2.0
- Temperature IR Bricklet 2.0
- Thermal Imaging Bricklet
- Thermocouple Bricklet 2.0
- Tilt Bricklet
- UV Light Bricklet 2.0
- Voltage/Current Bricklet 2.0
- XMC1400 Breakout Bricklet
- Master Extensions
- Stromversorgungen
- Abgekündigte Produkte
- Timeline
- Software
- Kits
- Embedded Boards
- Spezifikationen
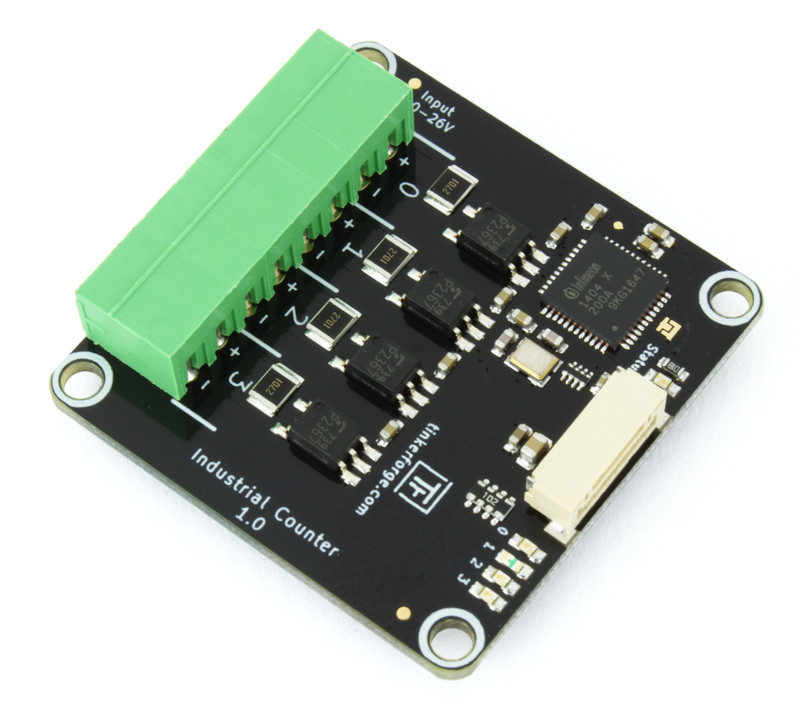
Industrial Counter Bricklet¶
Features¶
Frequenzzähler mit 4 galvanisch isolierten Kanälen
Konfigurierbarer Flankenzähler pro Kanal
Misst Tastverhältnis, Frequenz und Zustand pro Kanal
Frequenzmessung im Bereich von 0,03Hz bis 4MHz
Zeitauflösung bis zu 10,4ns und Frequenzauflösung bis zu 0,03Hz
Beschreibung¶
Das Industrial Counter Bricklet kann genutzt werden um Bricks um vier unabhängige Frequenzzähler zu erweitern.
Das Bricklet verfügt über einen integrierten Flankenzähler, der Tastverhältnis, Periode und die Frequenz getrennt pro Kanal messen kann. Frequenzen bis zu 4MHz können vom Bricklet verarbeitet werden.
Der Frequenzzähler kann steigende, fallende und beide Flankenwechsel zählen. Die Richtung des Zählers (hoch oder runter) ist einstellbar. Es ist auch möglich einen Kanal als Richtungseingang für einen anderen Zähler zu nutzen (z.B. high = zählt hoch, low = zählt runter).
Alle 4 Kanäle sind galavanisch voneinander getrennt.
Beispielanwendungen für das Bricklet ist das Auslesen eines PWM-Signals oder das Auslesen von Sensoren, die über einen Flankenzähler- oder einen Frequenzausgang verfügen.
Technische Spezifikation¶
Eigenschaft |
Wert |
|---|---|
Stromverbrauch |
100mW (20mA bei 5V) |
Eingangstyp |
Vier Optokoppler-Eingänge (mit 2,7kΩ Serienwiderstand) |
Eingangsstrom |
Abhängig von der Eingangsspannung, ca. 3,85mA/12V, 8,3mA/24V |
Maximale Eingangsspannung |
26V (DC) |
Low Level Spannung |
0-2V |
High Level Spannung |
10-26V |
Isolation |
3750Vrms (Optokoppler-Wert) |
Minimale Eingangsfrequenz |
0,03Hz |
Maximale Eingangsfrequenz |
4MHz |
Zeit-Auflösung |
bis zu 10.4ns (Duty Cycle Prescaler auf 1 gesetzt) |
Frequenz-Auflösung |
bis zu 0.03Hz (Frequenz-Integrationsszeit auf 32768ms gesetzt) |
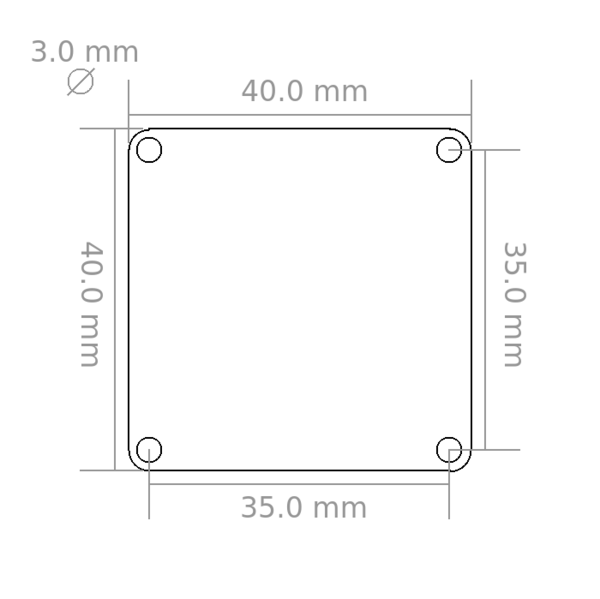
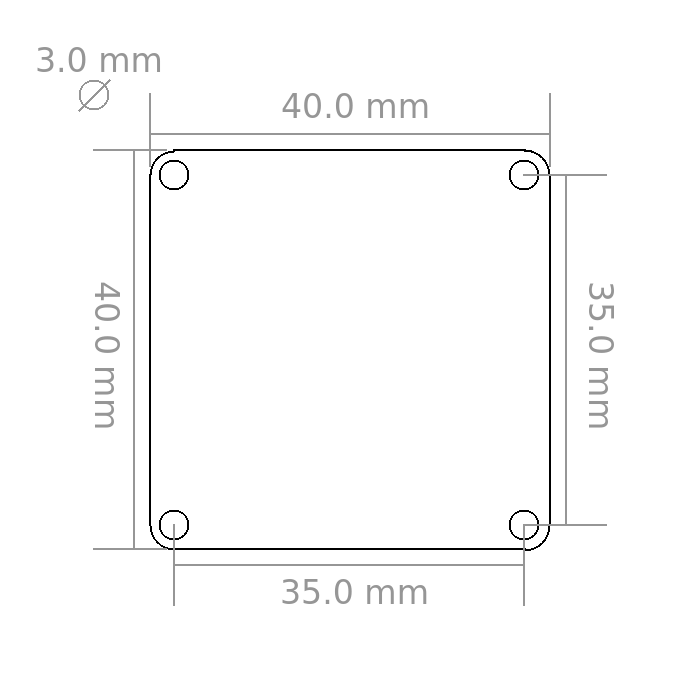
Abmessungen (B x T x H) |
40 x 40 x 11mm (1,57 x 1,57 x 0,43") |
Gewicht |
8.4g |
Ressourcen¶
{kind=link}
Quadraturencoder / Inkrementalgeber¶
Das Industrial Counter Bricklet kann genutzt werden um bis zu zwei Quadraturencoder bzw Inkrementalgeber mit Quadratursignal auszulesen.
Ein A/B-Paar des Encoders kann mit den Kanälen 0/2 und das andere Paar mit den Kanälen 1/3 verbunden werden.
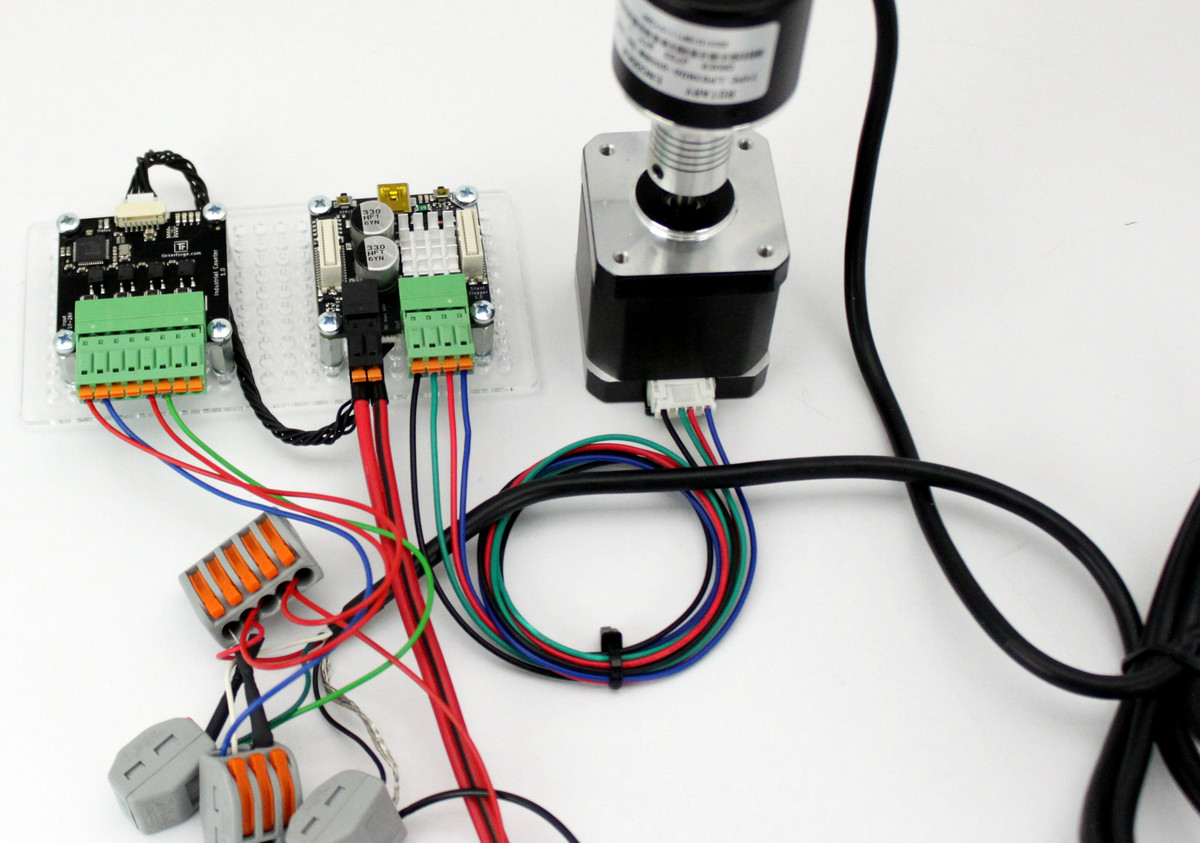
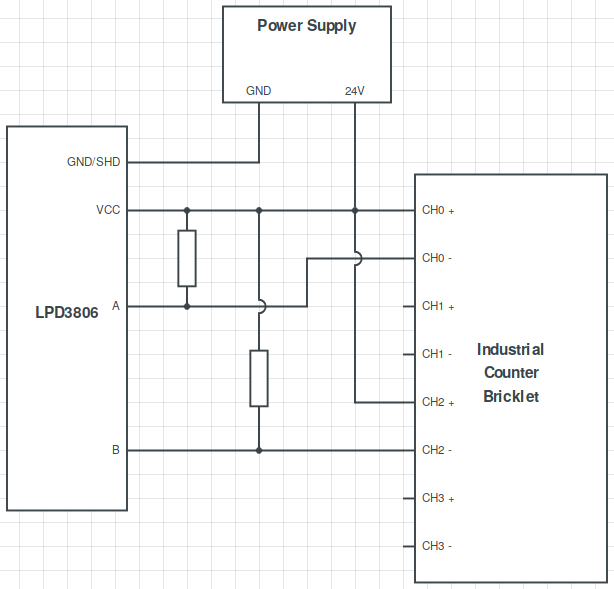
Um ein Beispiel bereitzustellen haben wir den LPD3806-600BM Encoder genutzt. Dieser Encoder hat eine einfache Schnittstelle die aus den Signalen A, B, VCC und GND/SHD besteht. Der Encoder kann per 24V-Stromversorgung versorgt werden.
Um den Encoder mit dem Industrial Counter Bricklet zu nutzen haben wir A und B mit einem 1k-Ohm Pull-Up zu VCC ausgestattet und A mit CH0- sowie B mit CH2- und VCC mit CH0+ und CH2+ verbunden:
In Software konfigurieren wir einfach Kanal 0 steigende Flanken zu zählen wenn Kanal 2 low ist (siehe Extern Count Direction für mehr Informationen zu dieser Konfiguration).
Der folgende Beispielcode (Python) führt die notwendigen Konfigurationen aus und startet eine volle Drehung mit dem Silent Stepper Brick. Danach liest er den Zählerstand von Kanal 0 des Industrial Counter Bricklets aus und gibt diesen auf der Console aus. Der LPD3806-600BM Encoder hat 600 Schritte pro Umdrehung, wir erwarten also einen Zählerstand von 600.
HOST = "localhost"
PORT = 4223
UID_COUNTER = "GfX"
UID_SILENT_STEPPER = "63noND"
from tinkerforge.ip_connection import IPConnection
from tinkerforge.bricklet_industrial_counter import BrickletIndustrialCounter
from tinkerforge.brick_silent_stepper import BrickSilentStepper
import time
if __name__ == "__main__":
ipcon = IPConnection() # Create IP connection
counter = BrickletIndustrialCounter(UID_COUNTER, ipcon) # Create device object
ss = BrickSilentStepper(UID_SILENT_STEPPER, ipcon) # Create device object
ipcon.connect(HOST, PORT) # Connect to brickd
# Don't use device before ipcon is connected
# Configure channel 0 to count up if channel 2 is low
counter.set_counter_configuration(counter.CHANNEL_0,
counter.COUNT_EDGE_RISING,
counter.COUNT_DIRECTION_EXTERNAL_DOWN,
counter.DUTY_CYCLE_PRESCALER_1,
counter.FREQUENCY_INTEGRATION_TIME_1024_MS)
counter.set_all_counter_active([True, False, False, False])
counter.set_counter(0, 0)
# Configure stepper motor with 800mA, 10000steps/s² acceleration,
# 1/16 step resolution, velocity 3200 steps/s and enable motor.
ss.set_motor_current(800)
ss.set_speed_ramping(10000, 10000)
ss.set_step_configuration(ss.STEP_RESOLUTION_16, True)
ss.set_max_velocity(3200)
ss.enable() # Enable motor power
# Move 3200 steps (at 1/16 step resolution and 200 steps per revolution
# this is exactly 1 full revolution)
ss.set_steps(3200)
# Wait for 3200 steps to finish
time.sleep(2)
# Get counter value.
# We expect this to return a value of 600 for the LPD3806-600BM encoder
encoder_count = counter.get_counter(0)
print('Encoder Count: {0}'.format(encoder_count))
ipcon.disconnect()
In unserem Test war die Ausgabe des Testprogramms exakt wie erwartet:
tf@pc:~/tests$ python count.py
> Encoder Count: 600
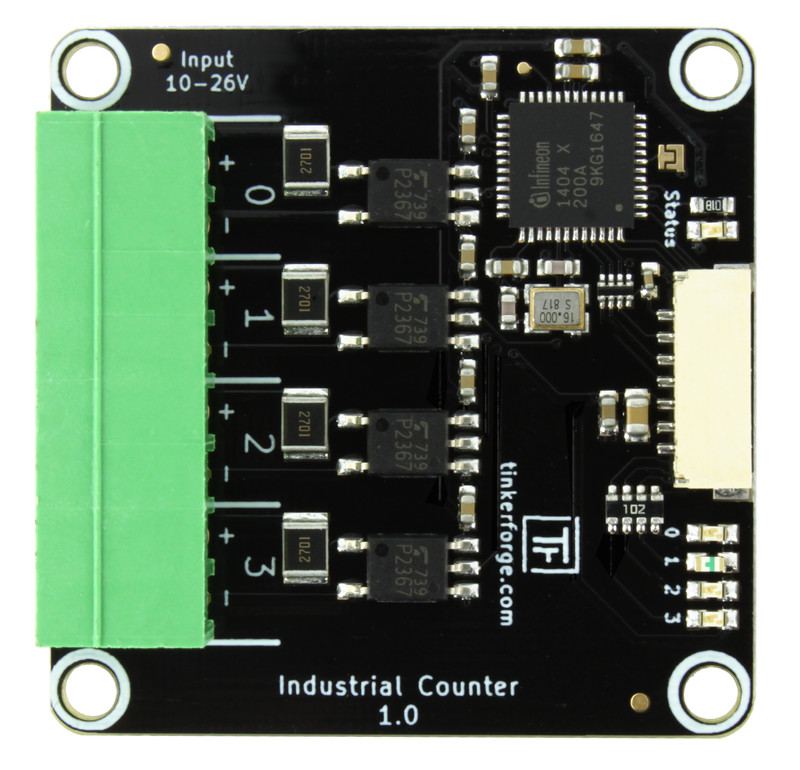
Kanal Status LEDs¶
Das Bricklet verfügt über die standard Status-LED sowie vier weitere LEDs (eine pro Kanal).
Standardmäßig leuchten die LEDs, wenn der dazugehörige Kanal high ist und umgekehrt. Die LEDs können aber auch per API ein/-ausgeschaltet werden um andere Statusinformationen anzuzeigen.
Duty Cycle Prescaler und Frequency Integration Time¶
Das Bricklet verfügt über zwei Konfigurationen pro Kanal:
Duty Cycle Prescaler: Prescaler für die interne Clock.
Intern nutzt das Bricklet eine 96Mhz Clock. Der Prescaler ist ein Teiler für diese Clock. Wenn die Eingangsfrequenz kleiner ist wie 1465Hz, kann der interne Zähler überlaufen (Overflow) und die Frequenzmessung wird verzerrt. In diesem Fall muss der Prescaler erhöht werden.
Ist die Frequenz über 1465Hz, kann der Prescaler immer auf 1 gesetzt werden. Ist die Eingangsfrequenz unter 1465Hz, kann die untere Tabelle genutzt werden um einen Prescaler zu wählen, der die höchste Auflösung ermöglicht.
1: Minimale Frequenz 1465Hz, Auflösung 10.4ns
2: Minimale Frequenz 733Hz, Auflösung 20.8ns
4: Minimale Frequenz 367Hz, Auflösung 41.6ns
8: Minimale Frequenz 184Hz, Auflösung 83.3ns
16: Minimale Frequenz 92Hz, Auflösung 166.6ns
32: Minimale Frequenz 46Hz, Auflösung 333.3ns
64: Minimale Frequenz 23Hz, Auflösung 0.66us
12: Minimale Frequenz 12Hz, Auflösung 1.33us
256: Minimale Frequenz 6Hz, Auflösung 2.66us
512: Minimale Frequenz 3Hz, Auflösung 5.33us
1024: Minimale Frequenz 2Hz, Auflösung 10.66us
2048: Minimale Frequenz 0.7Hz, Auflösung 21.33us
4096: Minimale Frequenz 0.36Hz, Auflösung 42.66us
8192: Minimale Frequenz 0.18Hz, Auflösung 85.33us
16384: Minimale Frequenz 0.09Hz, Auflösung 170.66us
32768: Minimale Frequenz 0.045Hz, Auflösung 341.33us
Frequency Integration Time: Zeit die genutzt wird um die Frequenz zu berechnen.
Die Frequenz wird berechnet indem die Anzahl der Flanken in der gewählten Integrationszeit ermittelt wird. Beispiel: Die Frequency Integration Time ist auf 2048ms gesetzt und das Bricklet sieht 40960 Flankenwechsel in dieser Zeit. Die ermittelte Frequenz beträgt dann 20kHz (40960 Flanken geteilt durch 2,048 Sekunden).
Damit die Frequenzermittlung korrekt funktioniert muss die Frequency Integration Time größer sein wie die Periode der gemessenen Frequenz.
Die Aktualisierungsrate der Frequenz ist abhängig von der Frequency Integration Time. Eine kleine Integration Time führt zu einer häufigeren Aktualisierung. Wird die Zeit zum Beispiel auf 4096ms gesetzt, so wird die Frequenz nur alle ~4 Sekunden aktualisiert.
Die Auflösung der gemessenen Frequenz erhöht sich mit steigender Integrationszeit:
128ms: 7.81Hz
256ms: 3.90Hz
512ms: 1.95Hz
1024ms: 0.98Hz
2048ms: 0.49Hz
4096ms: 0.24Hz
8192ms: 0.12Hz
16384ms: 0.06Hz
32768ms: 0.03Hz
Count, Duty Cycle, Period, Frequency, Value¶
Das Industrial Counter Bricklet misst fünf verschiedene Dinge:
Count: Dieser Wert ist gleich der Anzahl der gemessenen Flankenwechsel. Das Bricklet kann steigende, fallende oder beide Flankenwechsel zählen. Die Richtung des Zählens (hoch oder runter) kann eingestellt werden. Für Kanal 0 und 3 ist es möglich einen anderen Kanal als Steuerungseingang für die Zählrichtung zu nutzen.
Duty Cycle: Ist der prozentuale Anteil des Signals pro Periode der high ist.
Period: Ist die Dauer eine Periode.
Frequency: Ist die Frequenz des Signals, gemessen über eine längere Zeit.
Value: Ist der aktuelle Zustand des Kanals (entweder high oder low).
Duty Cycle und Periode werden jeweils für den letzten Zyklus ausgegeben. Die Frequenz wird über die konfigurierte Frequency Integration Time berechnet. Wenn die Zyklen einen Jitter besitzen, so zeigen nur Period und Duty Cycle diesen Jitter. Frequency bleibt stabil.
Wenn die Auflösung der Periode hoch genug und die Frequenz stabil ist, so ist die berechnete Frequenz gleich 1/Period.
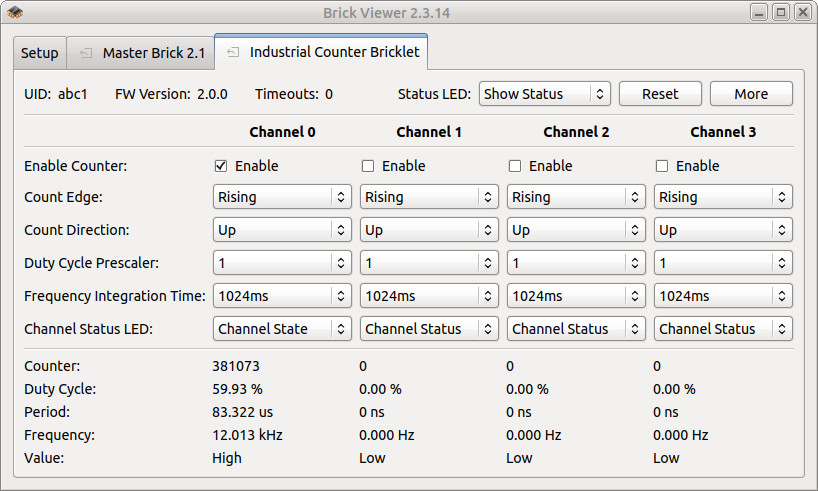
Die nachfolgenden Screenshots zeigen verschiedene Messungen eines 12kHz Signals mit 60% Tastverhältnis mit einem Oszilloskop
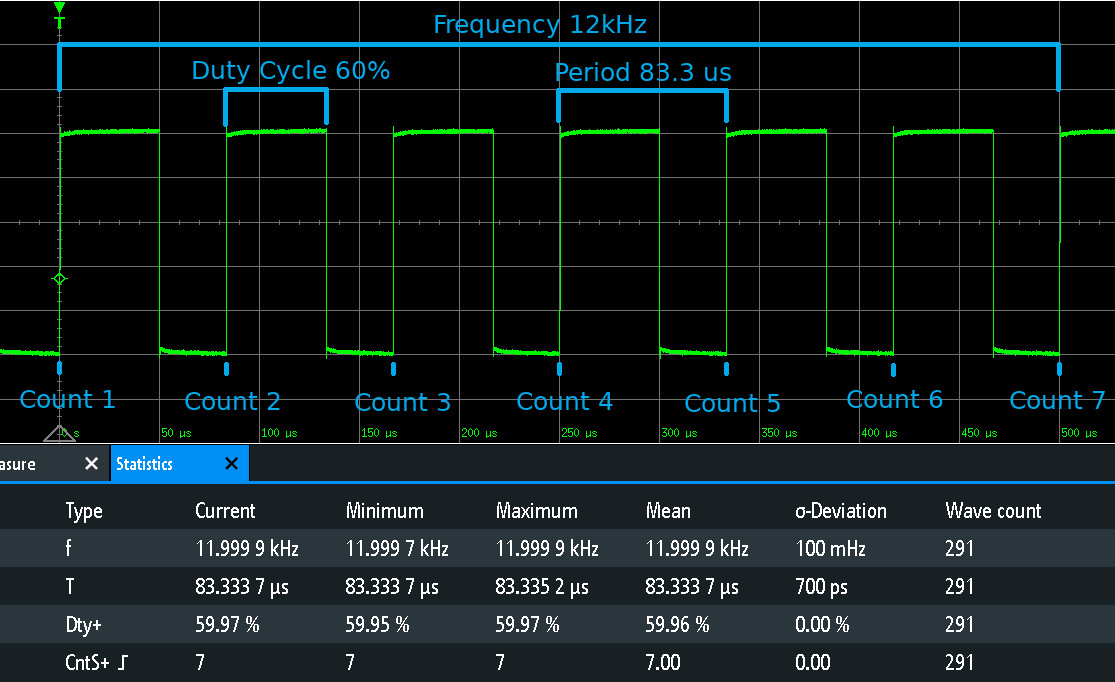
sowie das selbe Signal mit dem Industiral Counter Bricklet über den Brick Viewer.
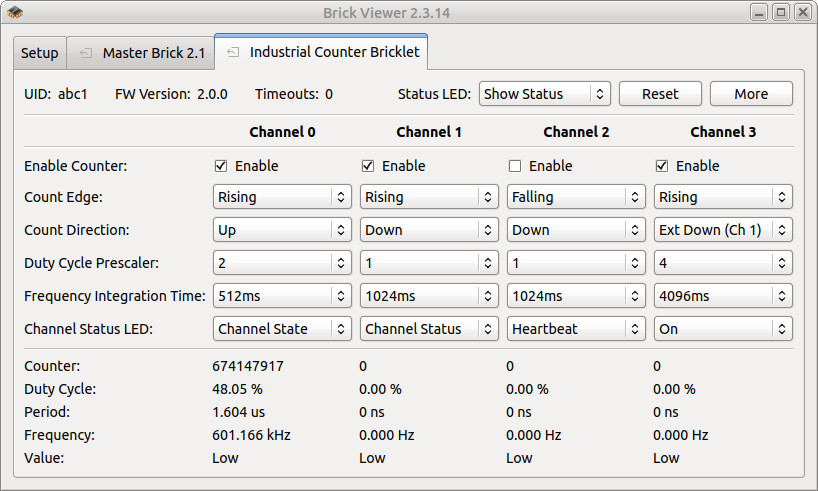
External Count Direction¶
Die Zählrichtung (hoch oder runter) kann konfiguriert und jederzeit geändert werden. Kanal 0 erlaubt es zusätzlich Kanal 2 als Richtungssteuerungseingang zu verwenden. In diesem Fall wird der Zähler von Kanal 0 inkrementiert (hoch zählen), wenn Kanal 2 high ist und dekrementiert (runter zählen) wenn Kanal 2 low ist.
Für Kanal 3 kann Kanal 1 in gleicher Weise als Richtungseingang verwendet werden.
Erster Test¶
Um ein Industrial Counter Bricklet testen zu können, müssen zuerst Brick Daemon und Brick Viewer installiert werden. Brick Daemon arbeitet als Proxy zwischen der USB Schnittstelle der Bricks und den API Bindings. Brick Viewer kann sich mit Brick Daemon verbinden, gibt Informationen über die angeschlossenen Bricks und Bricklets aus und ermöglicht es diese zu testen.
Als nächstes muss das Industrial Counter Bricklet mittels eines Bricklet Kabels mit einem Brick verbunden werden.
Wenn der Brick per USB an den PC angeschlossen wird sollte einen Moment später im Brick Viewer ein neuer Tab namens "Industrial Counter Bricklet" auftauchen. Wähle diesen Tab aus. Wenn alles wie erwartet funktioniert können nun die Kanäle konfiguriert werden und es sollten die dazugehörigen Zähler angezeigt werden.
Nun kann ein eigenes Programm geschrieben werden. Der Abschnitt Programmierschnittstelle listet die API des Industrial Counter Bricklet und Beispiele in verschiedenen Programmiersprachen auf.
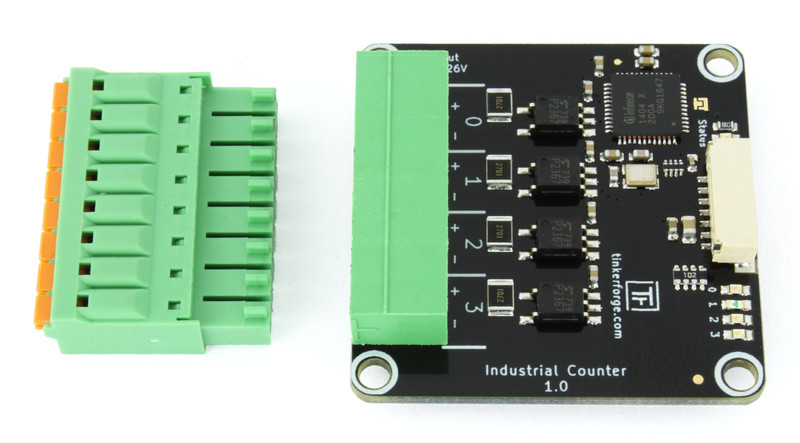
Gehäuse¶
Ein laser-geschnittenes Gehäuse für das Industrial Counter Bricklet ist verfügbar.
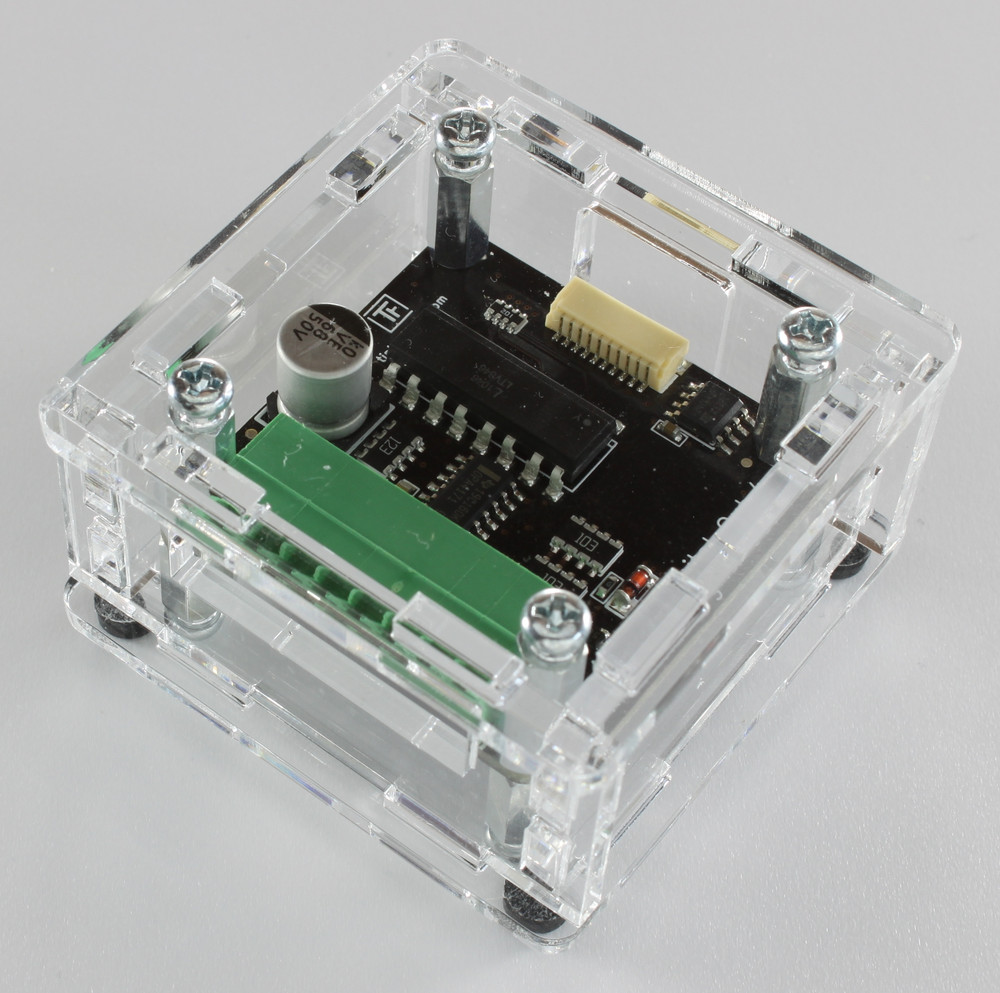
Der Aufbau ist am einfachsten wenn die folgenden Schritte befolgt werden:
Schraube Abstandshalter an das Bricklet,
schraube Unterteil an untere Abstandshalter,
baue Seitenteile auf,
stecke zusammengebaute Seitenteile in Unterteil und
schraube Oberteil auf obere Abstandshalter.
Im Folgenden befindet sich eine Explosionszeichnung des Industrial Counter Bricklet Gehäuses:
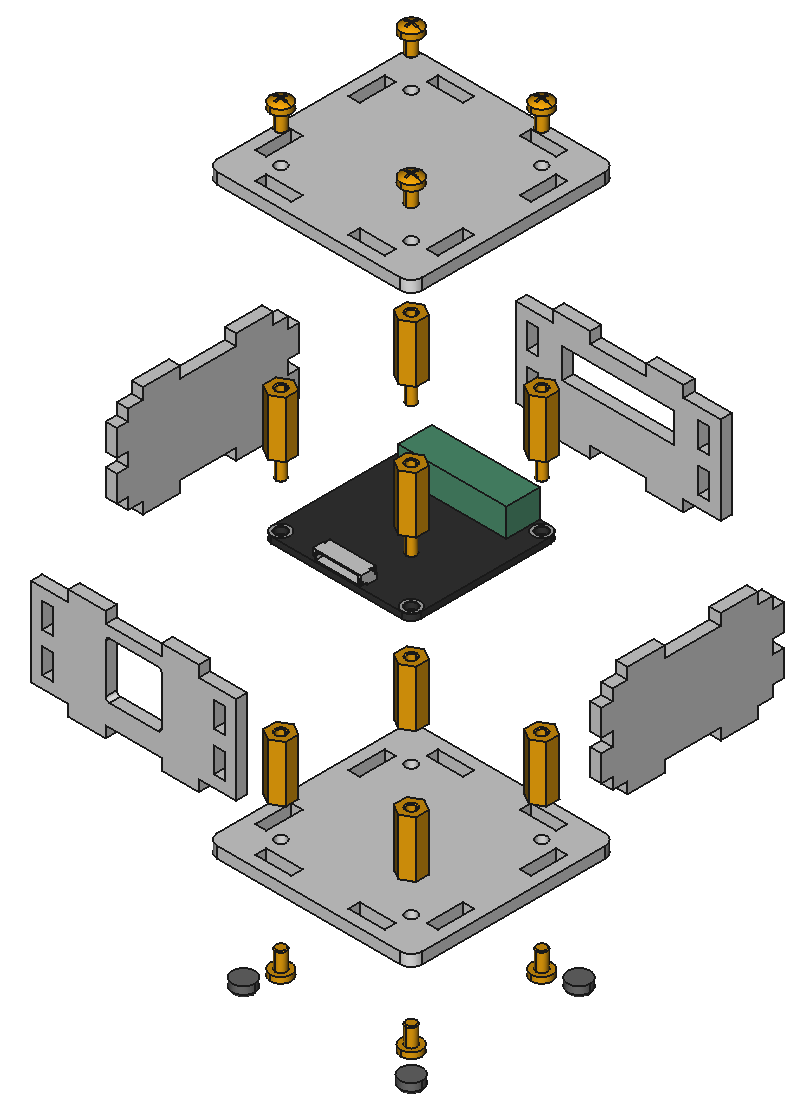
Hinweis: Auf beiden Seiten der Platten ist eine Schutzfolie, diese muss vor dem Zusammenbau entfernt werden.
Programmierschnittstelle¶
Siehe Programmierschnittstelle für eine detaillierte Beschreibung.
Sprache |
API |
Beispiele |
Installation |
|---|---|---|---|
C/C++ |
|||
C/C++ für Mikrocontroller |
|||
C# |
|||
Delphi/Lazarus |
|||
Go |
|||
Java |
|||
JavaScript |
|||
LabVIEW |
|||
Mathematica |
|||
MATLAB/Octave |
|||
MQTT |
|||
openHAB |
|||
Perl |
|||
PHP |
|||
Python |
|||
Ruby |
|||
Rust |
|||
Shell |
|||
Visual Basic .NET |
|||
TCP/IP |
|||
Modbus |